





























2-48
Note 6. Tighten the screws to a tightening torque of 0.5 to 0.6 N
m. The terminal block may be dam-
aged if the tightening torque is too strong, and malfunctions and short-circuits may result if the
tightening torque is too weak.
H
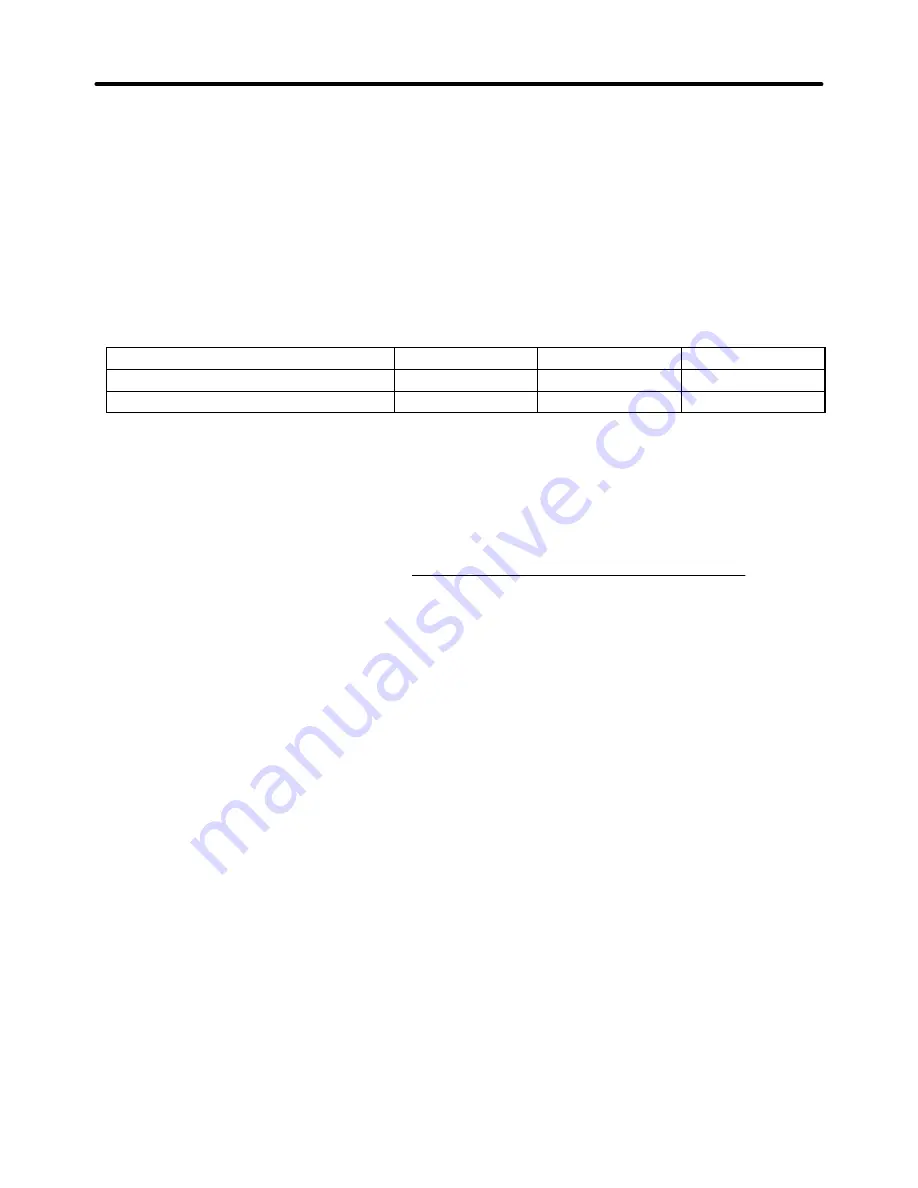
Selecting the Number of PG (Encoder) Pulses
D
3G3FV-PPGA2/-PPGB2
•
The maximum response frequency is 30 kHz.
•
Taking into consideration the encoder pulse deviation (phase difference: 90
±
45
°
) and the waveform
when the cable is long, select a smaller number of pulses than the ones shown in the following table.
Motor’s maximum speed (r/min)
1,800
1,500
900
Number of encoder pulses (p/r)
500
600
1,00
Maximum encoder frequency (kHz)
15
15
15
D
3G3FV-PPGD2/-PPGX2
•
The maximum response frequency is 300 kHz.
•
When the encoder pulse deviation (phase difference: 90
±
45
°
) is taken into consideration, the number
of encoder pulses can be calculated by means of the following formula:
Number of encoder pulses [p/r]
60 x maximum response frequency (300,000 Hz)
2 x motor’s maximum rotation speed (r/min)
x
•
If the motor’s maximum speed is less than 4,000 r/min, an encoder of 1,000 to 2,000 p/r is recom-
mended. Even if an encoder with higher than required resolution is selected, it will not improve the
speed control range or precision.
Installation
Chapter 2
Summary of Contents for SYSDRIVE 3G3FV
Page 1: ...USER S MANUAL High function General purpose Inverter SYSDRIVE 3G3FV Cat No I516 E1 4 ...
Page 16: ...Chapter 1 Introduction 1 1 Function 1 2 Nomenclature 1 3 New Functions 1 ...
Page 33: ...Chapter 2 Installation 2 1 Mounting 2 2 Wiring 2 ...
Page 112: ...Chapter 4 Trial Operation 4 1 Procedure 4 2 Operation Example 4 ...
Page 289: ...Chapter 7 Parameter Lists 7 1 Initialize Mode Parameters 7 2 Program Mode Parameter List 7 ...
Page 366: ...Chapter 9 Specifications 9 1 Inverter Specifications 9 2 Option Specifications 9 ...
Page 395: ...Chapter 10 Appendix 10 1 Notes on Using the Inverter for a Motor 10 ...