





























6-21
H
Torque Reference Settings
•
Set multi-function analog input (terminal 16) or frequency reference current input (terminal 14) to
torque reference. The torque reference value cannot be set with the Digital Operator.
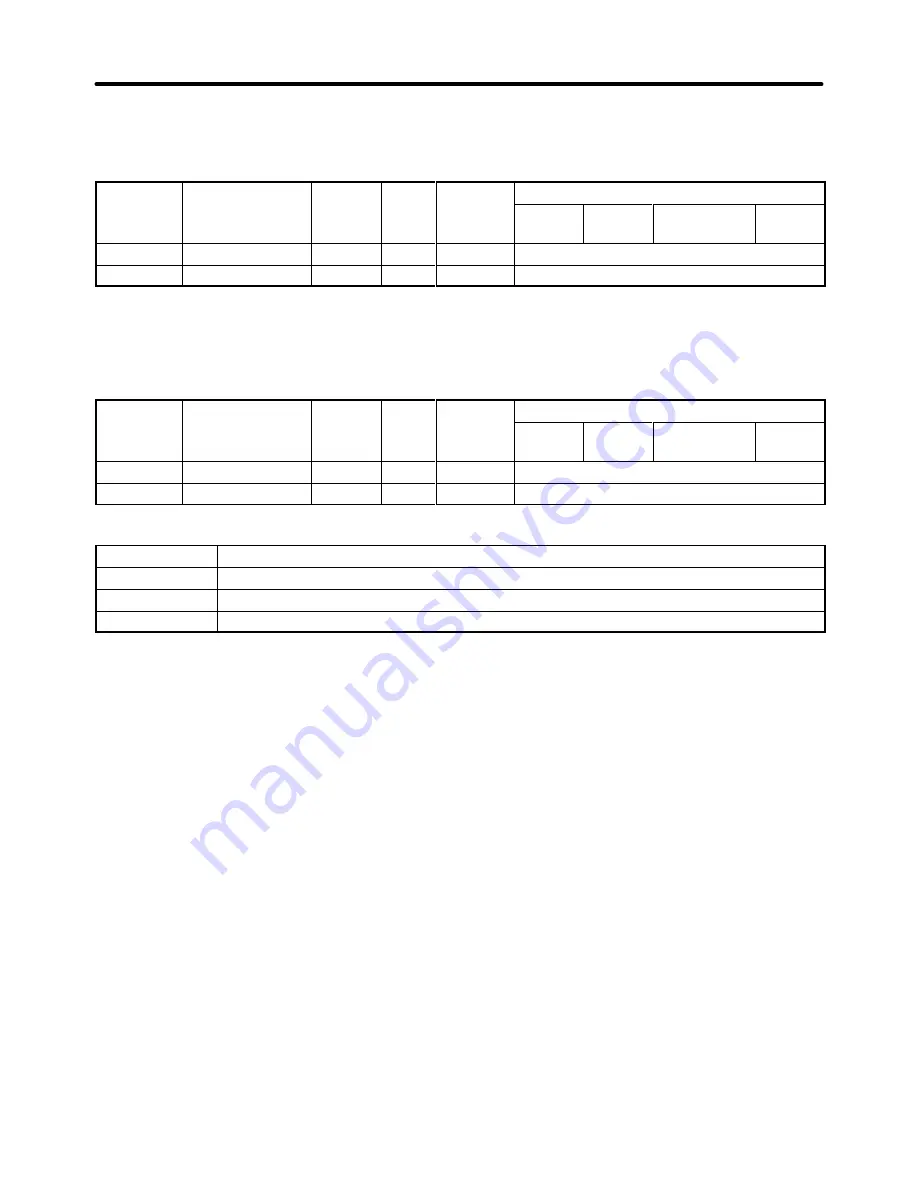
Parameter
Display name
Setting
Units
Default
Valid access levels
number
p y
g
range
setting
V/f
Control
V/f with
PG
Open Loop
Vector
Flux
Vector
H3-05
Terminal 16 Sel
0 to 1F
---
1F
Basic or Advanced
H3-09
Terminal 14 Sel
1 to 1F
---
1F
Advanced
Note Set either one of these parameters to torque reference (setting 13). (These parameters cannot be
changed during operation.)
•
Next, set the signal level for the analog input terminal that was set to torque reference. These parame-
ters cannot be changed during operation.
Parameter
Display name
Setting
Units
Default
Valid access levels
number
p y
g
range
setting
V/f
Control
V/f with
PG
Open Loop
Vector
Flux
Vector
H3-04
Term 16 Signal
0 or 1
---
0
Basic or Advanced
H3-08
Term 14 Signal
0 to 2
---
2
Advanced
Signal Level Settings
Setting
Function
0
0- to +10-V input (When H3-08 is being set, be sure to disconnect jumper wire J1.)
1
0- to
±
10-V input (When H3-08 is being set, be sure to disconnect jumper wire J1.)
2
4- to 20-mA input (H3-08 only)
Note 1. Set the proper signal level for the torque reference that you want to input.
Note 2. The direction of the torque that is output is determined by the sign (polarity) of the signal that
was input. It is not determined by the direction of the run command (forward/reverse).
+Voltage (or current): Forward torque reference (generally counter-clockwise; axis side)
–Voltage:
Reverse torque reference (generally clockwise; axis side)
Since the polarity of the voltage input determines the direction, only forward torque refer-
ences can be input when the “0 to +10 V” or “4 to 20 mA” signal level has been selected. If you
want to input reverse torque references, be sure to select the “0 to
±
10 V” signal level.
Note 3. When supplying a voltage input to the frequency reference current input (terminal 14), be sure
to disconnect jumper wire J1 on the control board. If the jumper wire isn’t disconnected, the
input resistor will be destroyed.
Advanced Operation
Chapter 6
Summary of Contents for SYSDRIVE 3G3FV
Page 1: ...USER S MANUAL High function General purpose Inverter SYSDRIVE 3G3FV Cat No I516 E1 4 ...
Page 16: ...Chapter 1 Introduction 1 1 Function 1 2 Nomenclature 1 3 New Functions 1 ...
Page 33: ...Chapter 2 Installation 2 1 Mounting 2 2 Wiring 2 ...
Page 112: ...Chapter 4 Trial Operation 4 1 Procedure 4 2 Operation Example 4 ...
Page 289: ...Chapter 7 Parameter Lists 7 1 Initialize Mode Parameters 7 2 Program Mode Parameter List 7 ...
Page 366: ...Chapter 9 Specifications 9 1 Inverter Specifications 9 2 Option Specifications 9 ...
Page 395: ...Chapter 10 Appendix 10 1 Notes on Using the Inverter for a Motor 10 ...