





























6-82
•
With this setting, the multi-function input can be used to enable or disable the multi-function analog
input.
•
Turning the input OFF has the same effect as setting H3-05 (the multi-function analog input selector
for terminal 16) to1F.
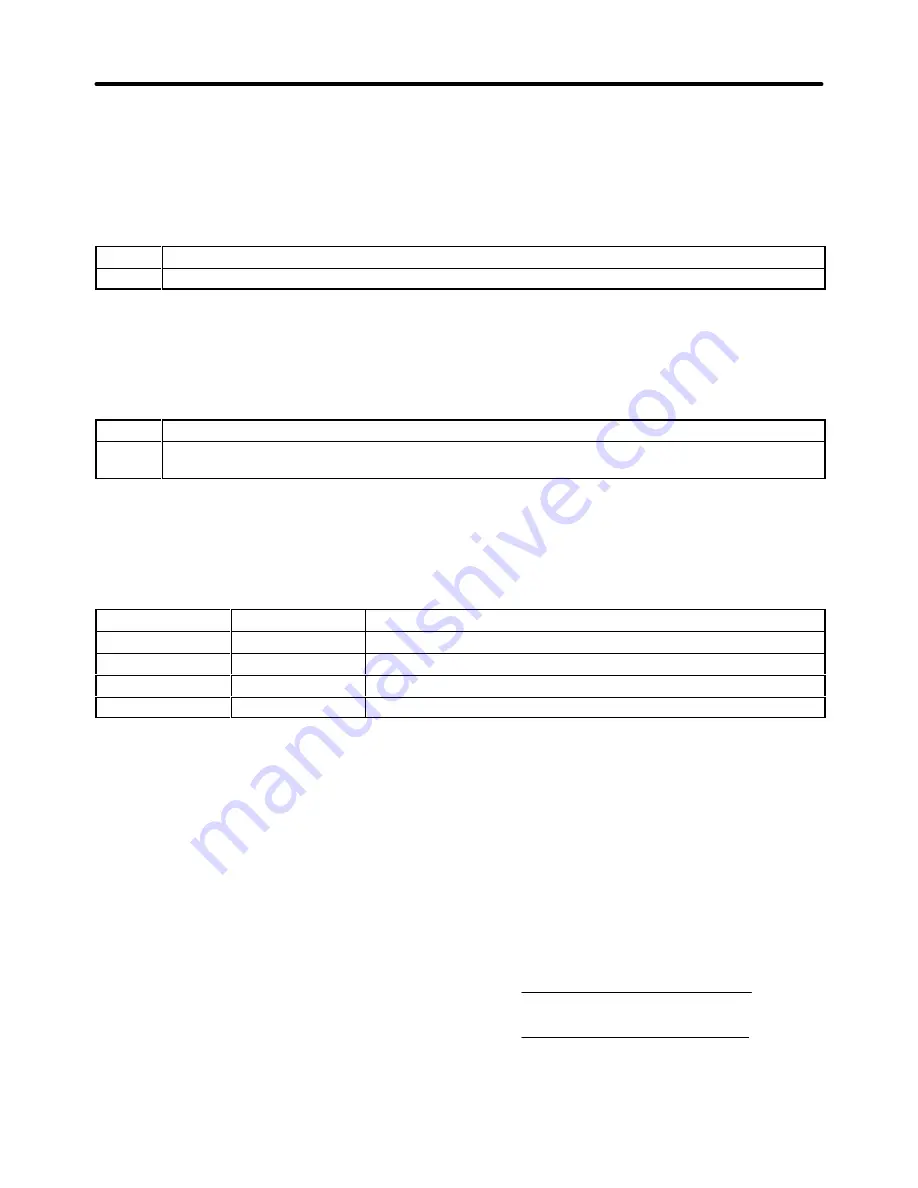
D
ASR Selection (Setting: D)
OFF
V/f control with PG feedback (speed control with speed feedback)
ON
Normal V/f control with PG feedback (Disables speed feedback control.)
•
With this setting, the multi-function input can be used to switch “V/f control with PG feedback” to “Nor-
mal V/f control.”
•
It is possible to switch between these control modes during operation.
D
ASR Integral Reset (Setting: E)
OFF
Operates with PI-control speed control loop.
ON
Operates with P-control speed control loop.
(The speed control’s integral values are reset by the integral time constant.)
•
This function is valid only in “V/f control with PG feedback” mode when parameter F1-07 is set to 0.
(Setting F1-07 to 0 disables ASR integral operation during acceleration/deceleration.)
•
It is possible to switch between these speed control modes during operation.
D
UP and DOWN Commands (Settings: 10 and 11)
UP command
DOWN command
Operation
ON
OFF
Acceleration
OFF
ON
Deceleration
ON
ON
Hold
OFF
OFF
Hold
•
With these settings, the multi-function inputs can be used to control the Inverter’s output frequency.
•
When using this function, be sure to set both the UP command (setting 10) and the DOWN command
(setting 11) in 2 multi-function inputs.
(An OPE03 option fault will occur if only one of these commands is set.)
•
Be sure to set parameter b1-02 (the run command source selector) to 1 (external terminal). The up/
down function won’t operate with any other b1-02 setting.
•
The frequency up/down commands operate according to the normal acceleration/deceleration times
in C1-01 through C1-08.
•
The upper and lower limits for the output frequency with the up/down commands are determined by
the following settings:
Lower limit
)
Maximum frequency (E1–04)
Reference lower limit (d2–02)
100
Upper limit
)
Maximum frequency (E1–04)
Reference upper limit (d2–01)
100
When frequency reference (voltage) terminal 13 or frequency reference (current) terminal 14 is being
used as a frequency reference input, the greatest frequency value becomes the lower limit.
Advanced Operation
Chapter 6
Summary of Contents for SYSDRIVE 3G3FV
Page 1: ...USER S MANUAL High function General purpose Inverter SYSDRIVE 3G3FV Cat No I516 E1 4 ...
Page 16: ...Chapter 1 Introduction 1 1 Function 1 2 Nomenclature 1 3 New Functions 1 ...
Page 33: ...Chapter 2 Installation 2 1 Mounting 2 2 Wiring 2 ...
Page 112: ...Chapter 4 Trial Operation 4 1 Procedure 4 2 Operation Example 4 ...
Page 289: ...Chapter 7 Parameter Lists 7 1 Initialize Mode Parameters 7 2 Program Mode Parameter List 7 ...
Page 366: ...Chapter 9 Specifications 9 1 Inverter Specifications 9 2 Option Specifications 9 ...
Page 395: ...Chapter 10 Appendix 10 1 Notes on Using the Inverter for a Motor 10 ...