




























SD20-G Series
279
0: invalid 1:valid
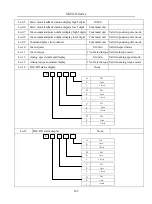
So-52
Encoder pulse filtering coefficient
speed position torque
Setting range
Setting unit
Mfr’s value
Effect
0~1000
N/A
0
Effective Immediate
When So-52≠0, the signal level which duration time is lower than
(
So-52/30MHz)s will be filtered.
So-54
Torque unreached protection setting
speed position torque
Setting range
Setting unit
Mfr’s value
When enabled
0~1
N/A
1
Effective Immediately
So-55
Torque unreached time
speed position torque
Setting range
Setting unit
Mfr’s value
When enabled
1
~
100
10ms
10
Effective Immediately
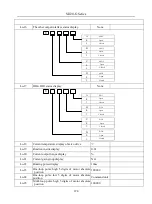
So-61
Analog monitor channel 2
Speed Position Torque
Setting range
Setting unit
Mfr’s value
Effect
0
~
3
N/A
0
Effective Immediate
Setting
value
Definition
Remarks
0
Servo drive output current
Determined by So-20
1
Servo drive output voltage
Determined by So-21
2
Servo motor speed
Determined by So-22
3
Output voltage 0V + offset
Offset voltage is determined
by So-62.
So-62
Voltage compensation for Analog monitor channel 2
Speed Position Torque
Setting range
Setting unit
Mfr’s value
Effect
-10000
~
10000
mv
0
Effective Immediate
8.1.3 Main function group
(
Po-
□□□
)
Po000
Motor code Speed Position Torque
Setting range
Setting unit
Mfr’s value
Effect
—
N/A
—
—
Po000 is motor code, user can check motor parameter by Po000.
Summary of Contents for SD20-G Series
Page 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Page 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Page 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Page 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Page 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Page 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































