


























SD20-G Series
133
-1000~1000
0.1%
1000
Effective Immediate
Po437
Upper limit voltage in torque analog mode
Speed Torque
Position
Setting range
Setting unit
Mfr’s value
When enabled
-1000~1000
0.01V
1000
Effective Immediate
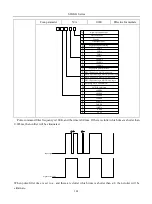
Note: in analog torque mode, the formula of motor torque is:
Torque corresponding to lower limit voltage=Po401 value× Po434 value
Torque corresponding to upper limit voltage=Po401 value× Po436 value\
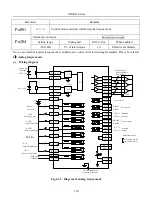
c)
Input signal
Signal name
Name
Terminals
Remarks
Analog torque command input
AS2
CN3–25
Analog torque command input
Grounding for analog
AGND
CN3–24
Range of input voltage: -10V~ +10V
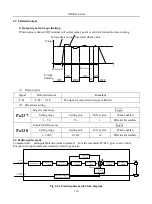
6.3.2 Soft start
This function is used to converter step torque command to constant acceleration slope mode at torque mode.
1)
Parameters setting
Po212
Torque increasing time
Torque
Setting range
Setting unit
Mfr’s value
When enabled
0~30000
0.1ms
0
Effective Immediate
Po213
Torque decreasing time
Torque
Setting range
Setting unit
Mfr’s value
When enabled
0~30000
0.1ms
0
Effective Immediate
2)
Instructions of increasing/decreasing time
T1 and T2 are actual torque increasing and decreasing time, the unit is ms.
Actual increasing time T1 =Po212 X target torque/rated torque
Rated torque
Target torque
T1
T2
Po212
Po213
T(Nm)
T(ms)
Summary of Contents for SD20-G Series
Page 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Page 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Page 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Page 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Page 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Page 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































