




























5 - 153
Chapter 5 Data Used for Positioning Control
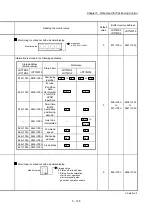
Reading the monitor value
Default
value
Buffer memory address
LD77MS2
LD77MS4
LD77MS16
Monitoring is carried out with a hexadecimal display.
b3
b6
b7
0: INC mode
1: ABS mode
ABS/INC mode
distinction for
magnetism type
encoder
Stored items
Details
b15
b12
b8
b4
b0
Connecting to
single-revolution
ABS encoder
Connecting to
magnetism type
encoder
0: Multi-revolution
ABS/INC
1: Single-revolution
ABS
0: No connection
1: Magnetism type
encoder
: Servo amplifier compatible with direct
drive motor use
(Refer to each servo amplifier instruction
manual for details.)
Compatible with
continuous
operation to
torque control
0: Incompatible
1: Compatible
Compatible with
scale
measurement
mode
0: Incompatible
1: Compatible
b8
b9
0000H
890+100n 2490+100n
Monitoring is carried out with a decimal display.
Monitor
value
Storage value
1 to 1000 (%)
0 891+100n
2491+100n
n: Axis No.-1
Содержание MELSEC-L Series
Страница 1: ...MELSEC L LD77MS Simple Motion Module User s Manual Positioning Control LD77MS2 LD77MS4 LD77MS16 ...
Страница 2: ......
Страница 30: ...MEMO ...
Страница 70: ...2 10 Chapter 2 System Configuration MEMO ...
Страница 83: ...3 13 Chapter 3 Specifications and Functions MEMO ...
Страница 103: ...3 33 Chapter 3 Specifications and Functions MEMO ...
Страница 107: ...3 37 Chapter 3 Specifications and Functions MEMO ...
Страница 111: ...3 41 Chapter 3 Specifications and Functions MEMO ...
Страница 115: ...3 45 Chapter 3 Specifications and Functions MEMO ...
Страница 140: ...4 22 Chapter 4 Installation Wiring and Maintenance of the Product MEMO ...
Страница 253: ...5 113 Chapter 5 Data Used for Positioning Control MEMO ...
Страница 342: ...5 202 Chapter 5 Data Used for Positioning Control MEMO ...
Страница 438: ...7 20 Chapter 7 Memory Configuration and Data Process MEMO ...
Страница 440: ...MEMO ...
Страница 485: ...9 25 Chapter 9 Major Positioning Control MEMO ...
Страница 594: ...9 134 Chapter 9 Major Positioning Control MEMO ...
Страница 624: ...10 30 Chapter 10 High Level Positioning Control MEMO ...
Страница 656: ...11 32 Chapter 11 Manual Control MEMO ...
Страница 690: ...12 34 Chapter 12 Expansion Control MEMO ...
Страница 798: ...13 108 Chapter 13 Control Sub Functions MEMO ...
Страница 866: ...14 68 Chapter 14 Common Functions MEMO ...
Страница 884: ...15 18 Chapter 15 Dedicated Instructions MEMO ...
Страница 899: ...16 15 Chapter 16 Troubleshooting MEMO ...
Страница 1036: ...Appendix 88 Appendices MEMO ...
Страница 1039: ......







































































