





























13 - 26
Chapter 13 Control Sub Functions
[4] Setting the torque limit function
(1) To use the "torque limit function", set the "torque limit value" in the
parameters shown in the following table, and write them to the Simple
Motion module.
a) The set details are validated at the rising edge (OFF
ON) of the PLC
READY signal [Y0].
Setting item
Setting
value
Setting details
Factory-set
initial value
Pr.17
Torque limit
setting value
Set the torque limit value as a percentage.
300
Pr.54
OPR torque limit
value
Set the torque limit value after the "
Pr.47
Creep speed
"
is reached. Set as a percentage.
300
b) The set details are validated at the rising edge (OFF
ON) of the
positioning start signal [Y10].
Setting item
Setting
value
Setting details
Factory-set
initial value
Cd.101
Torque output
setting value
Set the torque output value as a percentage.
0
: Refer to Section 5.2 "List of parameters" or Section 5.7 "List of control data" for setting details.
: Torque limit value: Will be an upper limit value of the torque change value. Even if a larger value has been
mistakenly input for the torque change value, it is restricted within the torque limit setting values to prevent an
erroneous entry. (Even if a value larger than the torque limit setting value has been input to the torque change
value, the torque value is not changed.)
: Torque output setting value: to be taken at the start of positioning, and used as a torque limit value. If the value
is "0" or larger than the torque limit setting value, the parameter "torque limit setting value" is taken at the start.
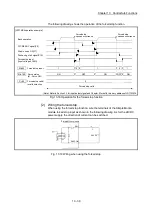
(2) The "torque limit value" set in the Simple Motion module is set in the "
Md.35
Torque limit stored value/forward torque limit stored value
" or "
Md.120
Reverse
torque limit stored value
".
[LD77MS4 use]
Buffer memory
LD77MS4
Positioning control
Torque limit value
1564
1552
26
86
826
891
1525
PLC CPU
Servo amplifier
Torque limit setting value
Torque limit stored value/
forward torque limit stored value
OPR torque limit value
New torque value/
forward new torque value
Torque output setting value
New reverse torque value
Reverse torque limit stored value
(Note): Refer to Chapter 5 for buffer memory address of LD77MS16.
Fig. 13.12 Limiting the torque to the servo amplifier (Axis 1)
Содержание MELSEC-L Series
Страница 1: ...MELSEC L LD77MS Simple Motion Module User s Manual Positioning Control LD77MS2 LD77MS4 LD77MS16 ...
Страница 2: ......
Страница 30: ...MEMO ...
Страница 70: ...2 10 Chapter 2 System Configuration MEMO ...
Страница 83: ...3 13 Chapter 3 Specifications and Functions MEMO ...
Страница 103: ...3 33 Chapter 3 Specifications and Functions MEMO ...
Страница 107: ...3 37 Chapter 3 Specifications and Functions MEMO ...
Страница 111: ...3 41 Chapter 3 Specifications and Functions MEMO ...
Страница 115: ...3 45 Chapter 3 Specifications and Functions MEMO ...
Страница 140: ...4 22 Chapter 4 Installation Wiring and Maintenance of the Product MEMO ...
Страница 253: ...5 113 Chapter 5 Data Used for Positioning Control MEMO ...
Страница 342: ...5 202 Chapter 5 Data Used for Positioning Control MEMO ...
Страница 438: ...7 20 Chapter 7 Memory Configuration and Data Process MEMO ...
Страница 440: ...MEMO ...
Страница 485: ...9 25 Chapter 9 Major Positioning Control MEMO ...
Страница 594: ...9 134 Chapter 9 Major Positioning Control MEMO ...
Страница 624: ...10 30 Chapter 10 High Level Positioning Control MEMO ...
Страница 656: ...11 32 Chapter 11 Manual Control MEMO ...
Страница 690: ...12 34 Chapter 12 Expansion Control MEMO ...
Страница 798: ...13 108 Chapter 13 Control Sub Functions MEMO ...
Страница 866: ...14 68 Chapter 14 Common Functions MEMO ...
Страница 884: ...15 18 Chapter 15 Dedicated Instructions MEMO ...
Страница 899: ...16 15 Chapter 16 Troubleshooting MEMO ...
Страница 1036: ...Appendix 88 Appendices MEMO ...
Страница 1039: ......







































































