





























12 - 8
Chapter 12 Expansion Control
The history of control mode switching is stored to the start history at request of
control mode switching. (Refer to Section 5.6.1 "System monitor data".)
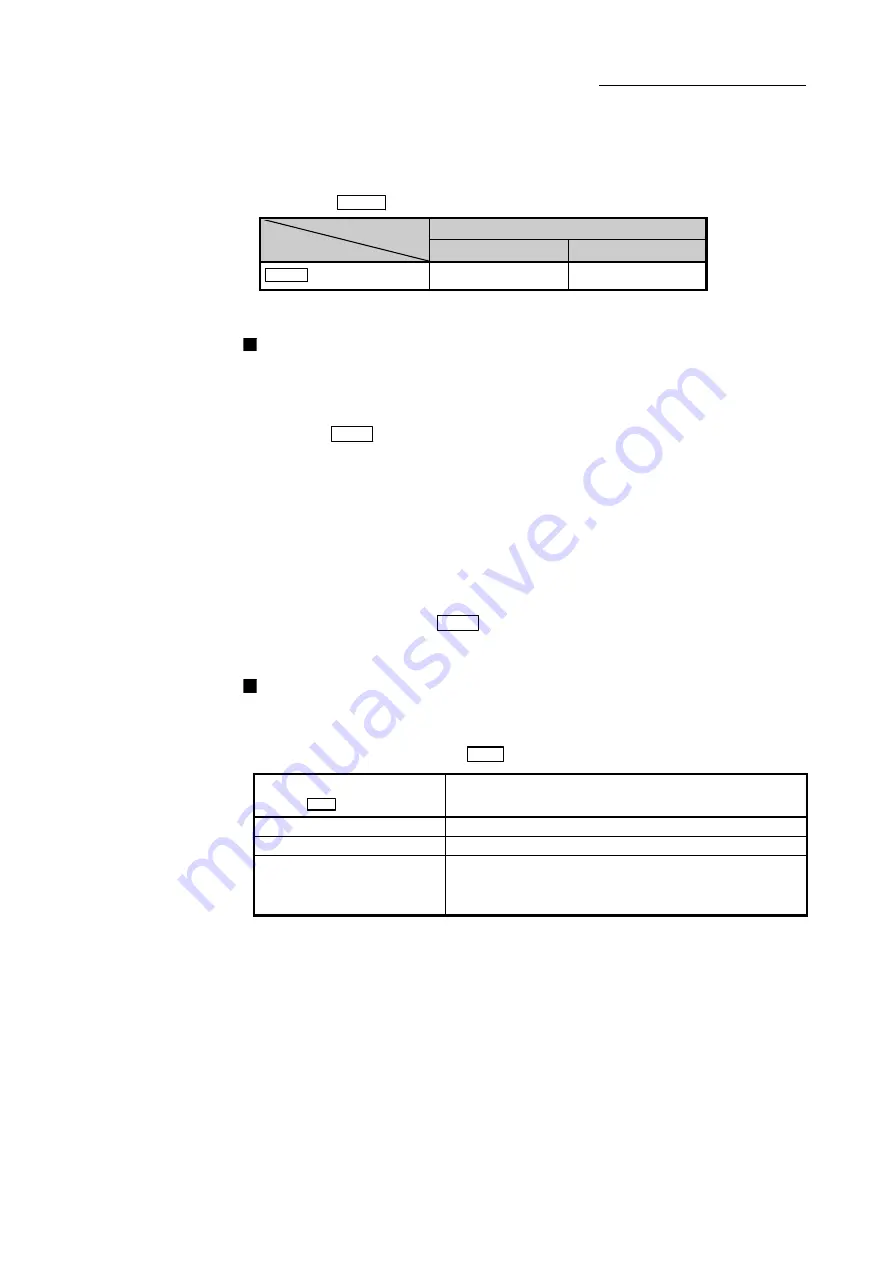
Confirm the control mode with "control mode (high-order buffer memory address:
b2, b3)" of "
Md.108
Servo status
". (Refer to Section 5.6.2 "Axis monitor data".)
Buffer memory address (High-order)
LD77MS2/LD77MS4
LD77MS16
Md.108
Servo status
: b2, b3
877+100n 2477+100n
n: Axis No.-1
Precautions at control mode switching
(1) The start complete signal and the positioning complete signal do not turn ON at
control mode switching.
(2) When "30: Control mode switch", "31: Speed control", or "32: Torque control" is
set in "
Md.26
Axis operation status
", the BUSY signal turns ON.
(3) The motor speed might change momentarily at switching from the speed
control mode to the torque control mode. Therefore, it is recommended that
the control mode is switched from the speed control to the torque control after
the servomotors stop.
(4) Use the continuous operation to torque control mode for the usage such as
pressing a workpiece. Do not execute the continuous operation to torque
control in the speed control mode. Otherwise, an unexpected operation might
occur at switching to the position control mode.
(5) "In speed control flag" (
Md.31
Status
: b0) does not turn ON during the speed
control mode in the speed-torque control.
Operation for "Position control mode
↔
Speed control mode switching"
When the position control mode is switched to the speed control mode, the
command speed immediately after the switching is the speed set in "speed initial
value selection (b8 to b11)" of "
Pr.90
Operation setting for speed-torque control mode
".
Speed initial value selection
(
Pr.90
: b8 to b11)
Command speed to servo amplifier immediately after switching from
position control mode to speed control mode
0: Command speed
The speed to servo amplifier immediately after switching is "0".
1: Feedback speed
Motor speed received from servo amplifier at switching.
2: Automatic selection
The command speed is invalid due to the setting of continuous
operation to torque control mode. At control mode switching,
operation is the same as "0: Command speed".
When the speed control mode is switched to the position control mode, the
command position immediately after the switching is the current feed value at
switching.
Содержание MELSEC-L Series
Страница 1: ...MELSEC L LD77MS Simple Motion Module User s Manual Positioning Control LD77MS2 LD77MS4 LD77MS16 ...
Страница 2: ......
Страница 30: ...MEMO ...
Страница 70: ...2 10 Chapter 2 System Configuration MEMO ...
Страница 83: ...3 13 Chapter 3 Specifications and Functions MEMO ...
Страница 103: ...3 33 Chapter 3 Specifications and Functions MEMO ...
Страница 107: ...3 37 Chapter 3 Specifications and Functions MEMO ...
Страница 111: ...3 41 Chapter 3 Specifications and Functions MEMO ...
Страница 115: ...3 45 Chapter 3 Specifications and Functions MEMO ...
Страница 140: ...4 22 Chapter 4 Installation Wiring and Maintenance of the Product MEMO ...
Страница 253: ...5 113 Chapter 5 Data Used for Positioning Control MEMO ...
Страница 342: ...5 202 Chapter 5 Data Used for Positioning Control MEMO ...
Страница 438: ...7 20 Chapter 7 Memory Configuration and Data Process MEMO ...
Страница 440: ...MEMO ...
Страница 485: ...9 25 Chapter 9 Major Positioning Control MEMO ...
Страница 594: ...9 134 Chapter 9 Major Positioning Control MEMO ...
Страница 624: ...10 30 Chapter 10 High Level Positioning Control MEMO ...
Страница 656: ...11 32 Chapter 11 Manual Control MEMO ...
Страница 690: ...12 34 Chapter 12 Expansion Control MEMO ...
Страница 798: ...13 108 Chapter 13 Control Sub Functions MEMO ...
Страница 866: ...14 68 Chapter 14 Common Functions MEMO ...
Страница 884: ...15 18 Chapter 15 Dedicated Instructions MEMO ...
Страница 899: ...16 15 Chapter 16 Troubleshooting MEMO ...
Страница 1036: ...Appendix 88 Appendices MEMO ...
Страница 1039: ......







































































