





























MM4006
M
o
t
i
o
n
Control Tutorial
4.2.6 M i n i m u m Incremental Motion
The Minimum Incremental Motion is the smallest motion that a device can
reliably make, measured with an external precision measuring device. The
controller can, for instance, execute a motion equal to the Resolution (one
encoder count) but in reality, the load may not move at all. The cause for
this is in the mechanics.
Load
Stiction
Elasticity
klll
Motor/Encoder
Fig. 4.4 — Effect of Striction and Elasticity on Small Motions.
Fig. 4.4 shows how excessive striction and elasticity between the encoder
and the load can cause the motion device to deviate from ideal motion
when executing small motions.
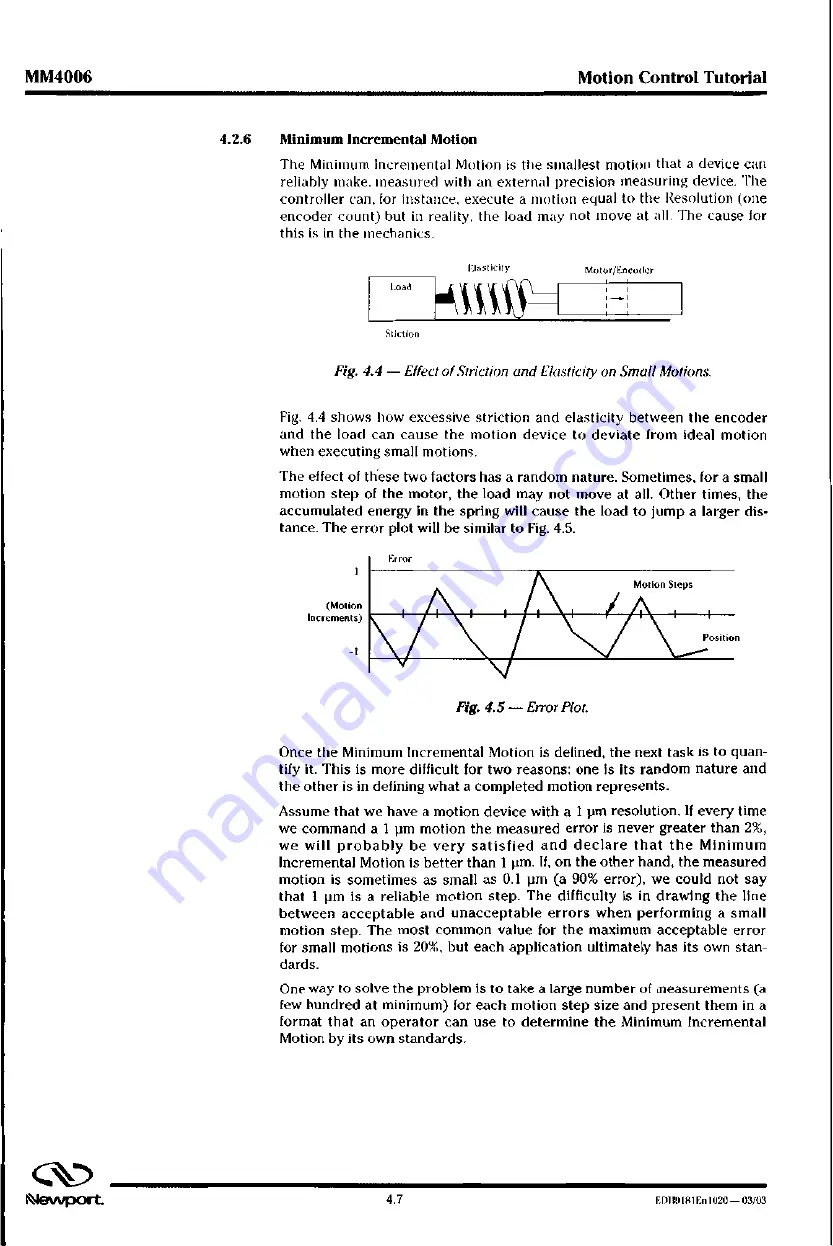
The effect of these two factors has a random nature. Sometimes, for a small
motion step of the motor, the load may not move at all. Other times, the
accumulated energy in the spring will cause the load to jump a larger dis-
tance. The error plot will be similar to Fig. 4.5.
Error
(Motion
Increments)
Fig. 4.5 — Error Plot.
Motion Steps
Position
Once the Minimum Incremental Motion is defined, the next task is to quan-
tify it. This is more difficult for two reasons: one is its random nature and
the other is in defining what a completed motion represents.
Assume that we have a motion device with a 1 pm resolution. If every time
we command a 1 pm motion the measured error is never greater than 2%,
we w i l l p r o b a b l y be v e r y satisfied a n d d e c l a r e t h a t t h e M i n i m u m
Incremental Motion is better than 1 pm. If, on the other hand, the measured
motion is sometimes as small as 0.1 pm (a 90% error), we could not say
that 1 pm is a reliable motion step. The difficulty is in drawing the line
between acceptable and unacceptable errors when performing a small
motion step. The most common value for the maximum acceptable error
for small motions is 20%, but each application ultimately has its own stan-
dards.
One way to solve the problem is to take a large number of measurements (a
few hundred at minimum) for each motion step size and present them in a
format that an operator can use to determine the Minimum Incremental
Motion by its own standards.
( )
N e v v p o r t .
4
.
7
EDI10181En1020 — 03/03
Summary of Contents for MM4006
Page 9: ...F D110181En1020 03 03 b J e w p o r t...
Page 11: ...MM4006 8 Axis Motion Controller Driver evvport...
Page 41: ...MM4006 Introduction FPI 111181Eli11120 0 1 03 1 3O tNevvport...
Page 42: ...Section 2 Local Mode C Newport...
Page 43: ...MM4006 8 Axis Motion Controller Driver C N e w p o r t...
Page 96: ...Section 3 Remote Mode C klevvport...
Page 97: ...Newport...
Page 310: ...Section 4 Motion Control Tutorial Ilevvport...
Page 311: ...MM4006 8 Axis Motion Controller Driver C EDI10181En 1020 03 03 2 N e V V p O r t...
Page 313: ...MM4006 8 Axis Motion Controller Driver cv ED110181E01020 03 03 4 2 M e v v p o r t...
Page 334: ...Section 5 Trajectory Functions Tutorial Newport...
Page 335: ...MM4006 8 Axis Motion Controller Driver C Newport...
Page 337: ...MM4006 8 Axis Motion Controller Driver EDH0181En1020 03 03 5 2 N e w p o r t...
Page 346: ...Section 6 Feature Descriptions Tutorial Newport...
Page 347: ...MM4006 8 Axis Motion Controller Driver C Nevvport...
Page 349: ...MM4006 8 Axis Motion Controller Driver ED11018lEn I 020 03 03 6 2 N e v v p O r t...
Page 359: ...MM4006 F e a t u r e Descriptions Tutorial cv EDI10181En1020 03 03 6 12 N e w p o r t...
Page 360: ...Section 7 Servo Tuning rano at 1 2 2 p EOF 110 1 0 0 0 0 0 ill fpL4 cv Newport...
Page 361: ...MM4006 8 Axis Motion Controller Driver C Nevvport...
Page 363: ...MM4006 8 Axis Motion Controller Driver EDH0181En 1020 03 03 7 2...
Page 368: ...Section 8 Appendices INevvport...
Page 369: ...MM4006 8 Axis Motion Controller Driver CkJ Newport...
Page 371: ...MM4006 8 Axis Motion Controller Driver EDI10181EnI020 03 03 8 2 N e v v p o r t...
Page 410: ...A7 h7s z c 7...







































































