





























MM4006
M
o
t
i
o
n
Control Tutorial
The best approach is to carefully study the application, extract from the
specification sheet the applicable discrete error parameters and combine
them (usually add them) to get the worst-case general error applicable to
the specific case. This method not only offers a more accurate value but
also gives a better understanding of the motion control system perfor-
mance and helps pinpoint problems.
Also, due to the integrated nature of the MM4006 system, many basic
errors can be significantly corrected by an other component of the loop.
Backlash, Accuracy and Velocity Regulation are just a few examples where
the controller can improve motion device performance.
4.3
Control Loops
r
When talking about motion control systems, one of the most important
questions is the type of servo loop implemented. The first major distinction
is between open and closed loops. Of course, this is of particular interest
when driving stepper motors. As far as the DC servo loops, the PID type is
by far the most widely used.
The MM4006 implements a PID servo loop with velocity feed-forward for
both DC and stepper-motor motion devices. It is not just a static closed
loop, when the motion is stopped, but a fully dynamic one.
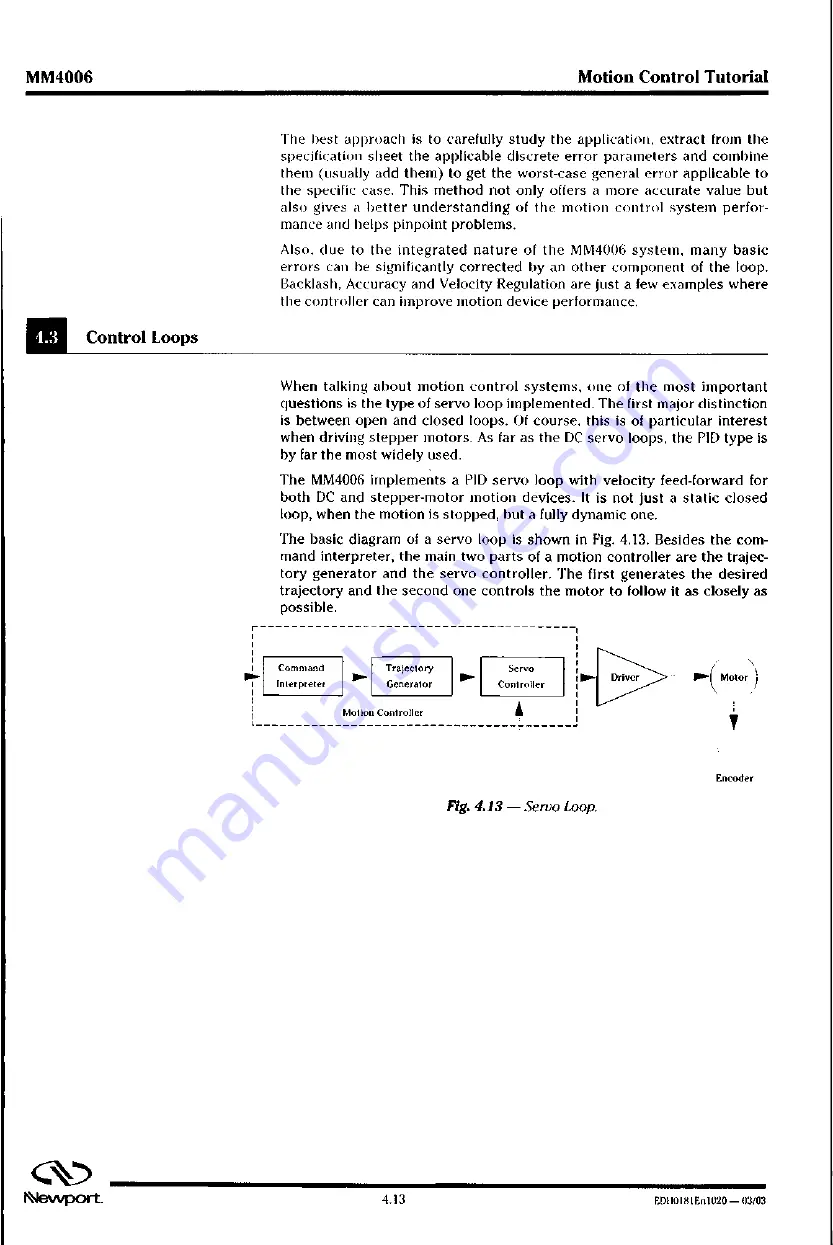
The basic diagram of a servo loop is shown in Fig. 4.13. Besides the com-
mand interpreter, the main two parts of a motion controller are the trajec-
tory generator and the servo controller. The first generates the desired
trajectory and the second one controls the motor to follow it as closely as
possible.
Command
Interpreter
-
Trajectory
Trajectory
Generator
Motion Controller
Servo
Controller
Controller
Encoder
Fig. 4.13
— Servo Loop.
N e V V p O r t .
4
.
1
3
E
D
I
101glEn1020 — 03/03
Summary of Contents for MM4006
Page 9: ...F D110181En1020 03 03 b J e w p o r t...
Page 11: ...MM4006 8 Axis Motion Controller Driver evvport...
Page 41: ...MM4006 Introduction FPI 111181Eli11120 0 1 03 1 3O tNevvport...
Page 42: ...Section 2 Local Mode C Newport...
Page 43: ...MM4006 8 Axis Motion Controller Driver C N e w p o r t...
Page 96: ...Section 3 Remote Mode C klevvport...
Page 97: ...Newport...
Page 310: ...Section 4 Motion Control Tutorial Ilevvport...
Page 311: ...MM4006 8 Axis Motion Controller Driver C EDI10181En 1020 03 03 2 N e V V p O r t...
Page 313: ...MM4006 8 Axis Motion Controller Driver cv ED110181E01020 03 03 4 2 M e v v p o r t...
Page 334: ...Section 5 Trajectory Functions Tutorial Newport...
Page 335: ...MM4006 8 Axis Motion Controller Driver C Newport...
Page 337: ...MM4006 8 Axis Motion Controller Driver EDH0181En1020 03 03 5 2 N e w p o r t...
Page 346: ...Section 6 Feature Descriptions Tutorial Newport...
Page 347: ...MM4006 8 Axis Motion Controller Driver C Nevvport...
Page 349: ...MM4006 8 Axis Motion Controller Driver ED11018lEn I 020 03 03 6 2 N e v v p O r t...
Page 359: ...MM4006 F e a t u r e Descriptions Tutorial cv EDI10181En1020 03 03 6 12 N e w p o r t...
Page 360: ...Section 7 Servo Tuning rano at 1 2 2 p EOF 110 1 0 0 0 0 0 ill fpL4 cv Newport...
Page 361: ...MM4006 8 Axis Motion Controller Driver C Nevvport...
Page 363: ...MM4006 8 Axis Motion Controller Driver EDH0181En 1020 03 03 7 2...
Page 368: ...Section 8 Appendices INevvport...
Page 369: ...MM4006 8 Axis Motion Controller Driver CkJ Newport...
Page 371: ...MM4006 8 Axis Motion Controller Driver EDI10181EnI020 03 03 8 2 N e v v p o r t...
Page 410: ...A7 h7s z c 7...







































































