





























MM4006
M
o
t
i
o
n
Control Tutorial
4.2.2 E r r o r
Error has the same definition as the Following Error with the exception that
the ideal trajectory is not compared t o the position feedback device
(encoder) but to an external precision measuring device.
In other words, the Following Error is the instantaneous error perceived by
the controller while the Error is the one perceived by the user.
4.2.3 A c c u r a c y
The Accuracy of a system is probably the most common parameter users
want to know. Unfortunately, due to its perceived simplicity, it is also the
easiest to misinterpret.
The Accuracy is a static measure of a point-to-point positioning error.
Starting from a reference point, we command the controller to move a cer-
tain distance. When the motion is completed, we measure the actual dis-
tance traveled with an external precision measuring device. The difference
(the Error) represents the positioning Accuracy for that particular motion.
Because every application is different, we need to know the errors for all
possible motions. Since this is practically impossible, an acceptable com-
promise is to perform the following test.
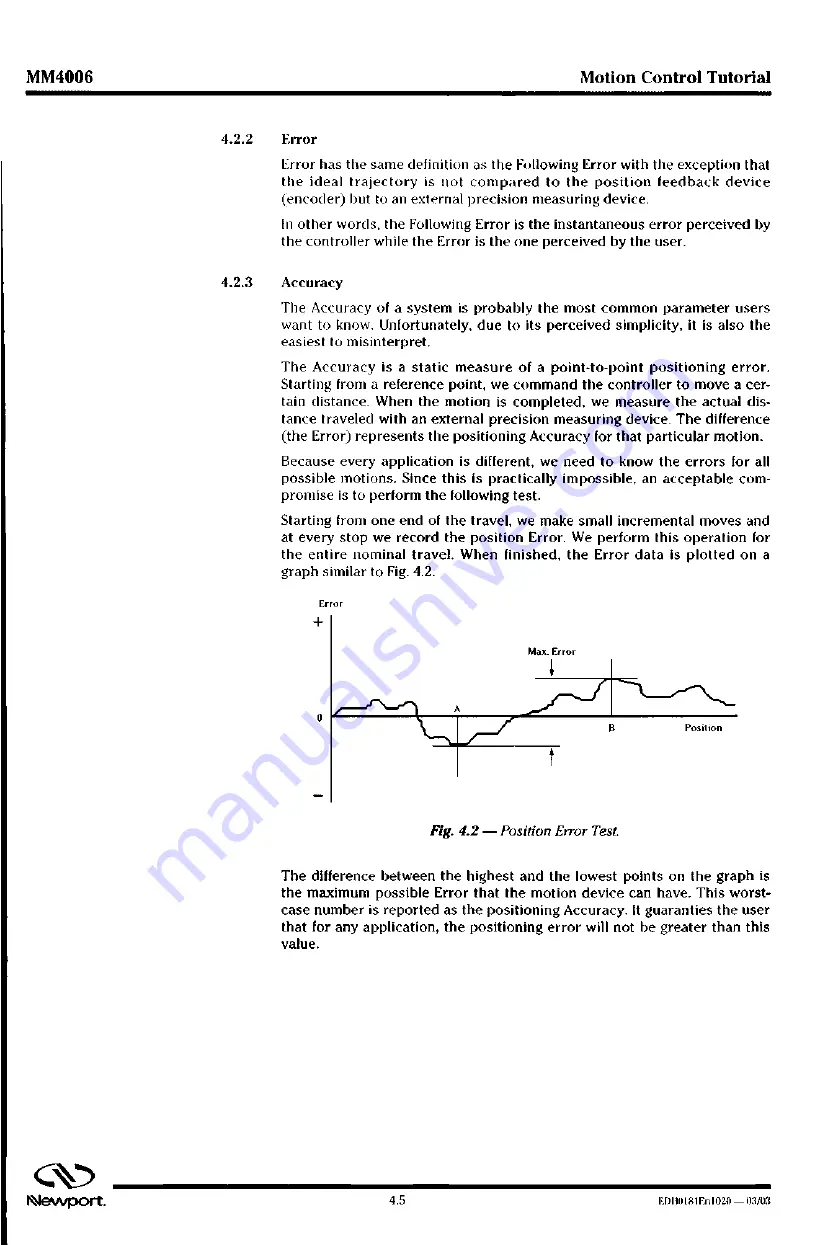
Starting from one end of the travel, we make small incremental moves and
at every stop we record the position Error. We perform this operation for
the entire nominal travel. When finished, the Error data is plotted on a
graph similar to Fig. 4.2.
Error
Max. Error
Position
Fig. 4.2 — Position Error Test.
The difference between the highest and the lowest points on the graph is
the maximum possible Error that the motion device can have. This worst-
case number is reported as the positioning Accuracy. It guaranties the user
that for any application, the positioning error will not be greater than this
value.
(%)
M e w p o r t .
4
.
5
EDI10181En1020 — 03/03
Summary of Contents for MM4006
Page 9: ...F D110181En1020 03 03 b J e w p o r t...
Page 11: ...MM4006 8 Axis Motion Controller Driver evvport...
Page 41: ...MM4006 Introduction FPI 111181Eli11120 0 1 03 1 3O tNevvport...
Page 42: ...Section 2 Local Mode C Newport...
Page 43: ...MM4006 8 Axis Motion Controller Driver C N e w p o r t...
Page 96: ...Section 3 Remote Mode C klevvport...
Page 97: ...Newport...
Page 310: ...Section 4 Motion Control Tutorial Ilevvport...
Page 311: ...MM4006 8 Axis Motion Controller Driver C EDI10181En 1020 03 03 2 N e V V p O r t...
Page 313: ...MM4006 8 Axis Motion Controller Driver cv ED110181E01020 03 03 4 2 M e v v p o r t...
Page 334: ...Section 5 Trajectory Functions Tutorial Newport...
Page 335: ...MM4006 8 Axis Motion Controller Driver C Newport...
Page 337: ...MM4006 8 Axis Motion Controller Driver EDH0181En1020 03 03 5 2 N e w p o r t...
Page 346: ...Section 6 Feature Descriptions Tutorial Newport...
Page 347: ...MM4006 8 Axis Motion Controller Driver C Nevvport...
Page 349: ...MM4006 8 Axis Motion Controller Driver ED11018lEn I 020 03 03 6 2 N e v v p O r t...
Page 359: ...MM4006 F e a t u r e Descriptions Tutorial cv EDI10181En1020 03 03 6 12 N e w p o r t...
Page 360: ...Section 7 Servo Tuning rano at 1 2 2 p EOF 110 1 0 0 0 0 0 ill fpL4 cv Newport...
Page 361: ...MM4006 8 Axis Motion Controller Driver C Nevvport...
Page 363: ...MM4006 8 Axis Motion Controller Driver EDH0181En 1020 03 03 7 2...
Page 368: ...Section 8 Appendices INevvport...
Page 369: ...MM4006 8 Axis Motion Controller Driver CkJ Newport...
Page 371: ...MM4006 8 Axis Motion Controller Driver EDI10181EnI020 03 03 8 2 N e v v p o r t...
Page 410: ...A7 h7s z c 7...







































































