

























3. SIGNALS AND WIRING
3 - 15
3.5.2 Output device
(1) Output device pin
The following shows the output device pins and parameters for assigning devices.
Connector pin No.
Parameter
Initial device
I/O division
Remark
A-axis B-axis C-axis
CN3-12
[Pr. PD07]
MBR-A
For A-axis
CN3-25 [Pr.
PD07] MBR-B For
B-axis
CN3-13
[Pr. PD07]
MBR-C
DO-1
For C-axis (Note)
CN3-11
[Pr. PD09]
[Pr. PD09]
[Pr. PD09]
CALM
Common pin
CN3-24
[Pr. PD08]
[Pr. PD08]
[Pr. PD08]
CINP
Common pin
Note. The pin is not used for MR-J4 2-axis servo amplifiers.
(2) Output device explanations
POINT
Initial letter and last letter with hyphen in device symbols mean target axis. Refer
to the following table.
Symbol
(Note)
Target axis
Description
C _ _ _
A/B/C
When all axes of A, B, and C meet a condition, the device
will be enabled (on or off).
X _ _ _
A/B/C
When each axis of A, B, or C meet a condition, the device
will be enabled (on or off).
_ _ _ -A
A-axis
Device for A-axis
_ _ _ -B
B-axis
Device for B-axis
_ _ _ -C
C-axis
Device for C-axis
Note.
_ _ _ differs depending on devices.
Device
Symbol
Function and application
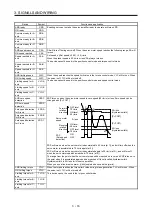
AND electromagnetic
brake interlock
CMBR
When using the device, set operation delay time of the electromagnetic brake in [Pr. PC02].
When a servo-off status or alarm occurs, MBR will turn off.
OR electromagnetic
brake interlock
XMBR
Electromagnetic
brake interlock for A-
axis
MBR-A
Electromagnetic
brake interlock for B-
axis
MBR-B
Electromagnetic
brake interlock for C-
axis
MBR-C
AND malfunction
CALM
When the protective circuit is activated to shut off the base circuit, ALM will turn off.
When an alarm does not occur, ALM will turn on about 3 s after power-on.
OR malfunction
XALM
Malfunction for A-axis
ALM-A
Malfunction for B-axis
ALM-B
Malfunction for C-axis
ALM-C
AND in-position
CINP
When the number of droop pulses is in the preset in-position range, INP will turn on. The in-
position range can be changed using [Pr. PA10]. When the in-position range is increased, INP may
be on during low-speed rotation.
The device cannot be used in the speed control mode, torque control mode, or continuous
operation to torque control mode.
OR in-position
XINP
In-position for A-axis
INP-A
In-position for B-axis
INP-B
In-position for C-axis
INP-C
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...