



























16. FULLY CLOSED LOOP SYSTEM
16 - 17
16.3.3 Operation from controller
The fully closed loop control compatible servo amplifier can be used with any of the following controllers.
Category Model
Remark
Motion controller
R_MTCPU/Q17_DSCPU
Speed control (II) instructions (VVF and VVR) cannot
be used.
Simple motion module
RD77MS_/QD77MS_/
LD77MS_
An absolute type linear encoder is necessary to configure an absolute position detection system under fully
closed loop control using a linear encoder. In this case, the encoder battery need not be installed to the
servo amplifier. When an rotary encoder is used, an absolute position detection system can be configured by
installing the encoder battery to the servo amplifier. In this case, the battery life will be shorter because the
power consumption is increased as the power is supplied to the two encoders of motor side and load side.
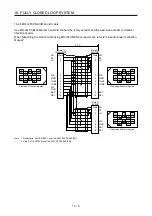
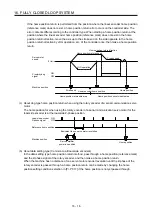
(1) Operation from controller
Positioning operation from the controller is basically performed like the semi closed loop control.
(2) Servo system controller setting
When using fully closed loop system, make the following setting.
[Pr. PA01], [Pr. PC17], [Pr. PE01], [Pr. PE03] to [Pr. PE05], [Pr. PE34] and [Pr. PE35] are written to the
servo amplifier and then are enabled using any of the methods indicated by in Parameter enabled
conditions. [Pr. PE06] to [Pr. PE08] are enabled at setting regardless of the valid conditions.
Setting item
Parameter enabled
conditions
Settings
Controller
reset
Power
supply
Off
→
on
Motion
controller
R_MTCPU/
Q17_DSCPU
Simple motion
module
RD77MS_/
QD77MS_/
LD77MS_
Command
resolution
Load-side encoder resolution
unit
Servo
parameter
MR-J4-B fully closed loop servo amplifier setting
MR-J4-B fully closed loop control
Motor setting
Automatic setting
Home position setting condition selection ([Pr. PC17])
Set the items as required.
Fully closed loop selection ([Pr. PA01] and [Pr. PE01])
Fully closed loop selection 2 ([Pr. PE03])
Fully closed loop control error detection speed deviation
error detection level
([Pr. PE06])
Enabled at setting
regardless of the
enabled conditions
Fully closed loop control error detection position
deviation error detection level
([Pr. PE07])
Fully closed loop electronic gear numerator ([Pr. PE04]
and [Pr. PE34])
Fully closed loop electronic gear denominator ([Pr. PE05]
and [Pr. PE35])
Fully closed loop dual feedback filter ([Pr. PE08])
Enabled at setting
regardless of the
enabled conditions
Positioning
control
parameter
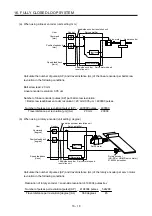
Unit setting
mm/inch/degree/pulse
Number of pulses per revolution (AP)
Travel distance per revolution (AL)
For the setting methods, refer to (2) (a), (b) in this section.
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































