



























5. PARAMETERS
5 - 45
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
Each/
Common
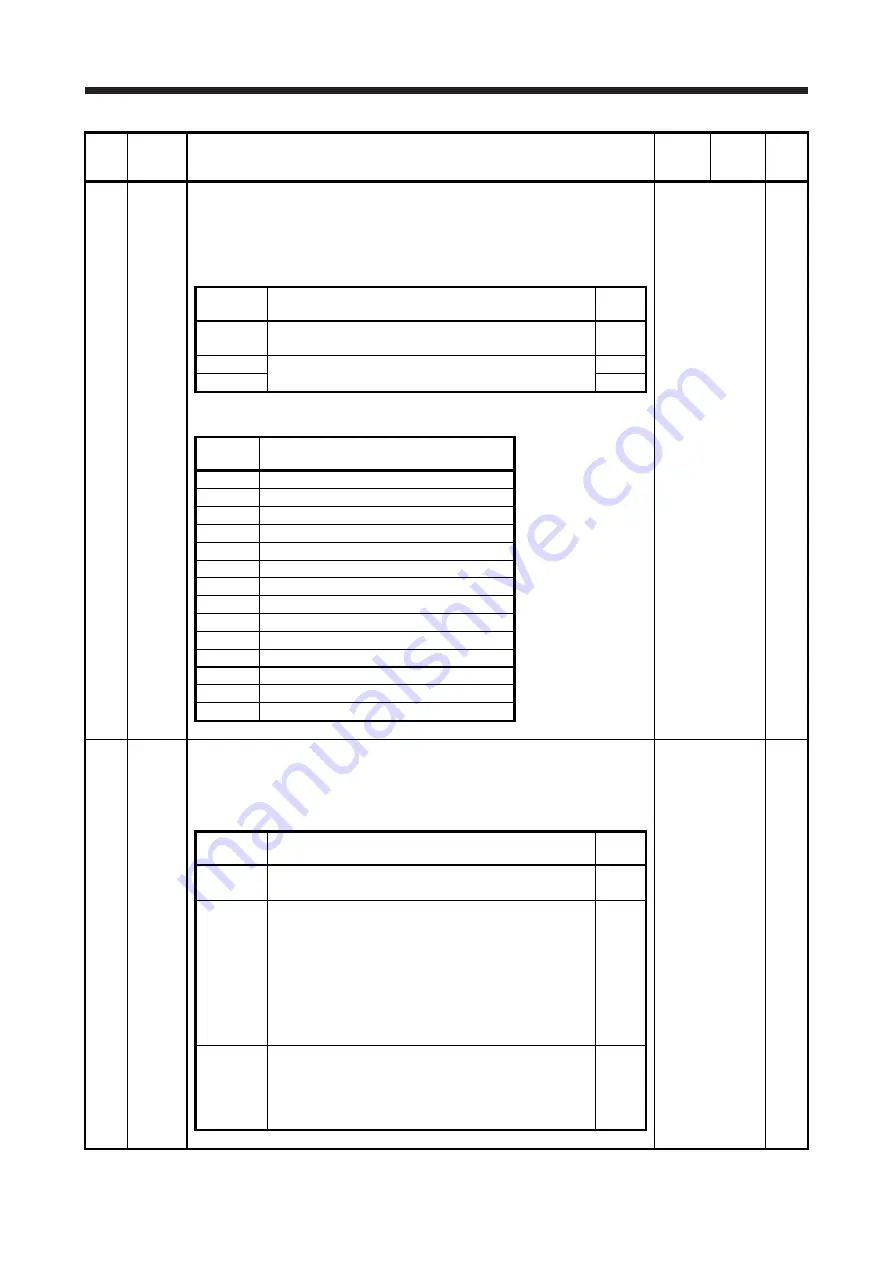
PD07
*DO1
Output device selection 1
You can assign any output device to pins CN3-12, CN3-13, and CN3-25. In the initial
setting, the following devices are assigned to the pins.
CN3-12 pin: MBR-A (Electromagnetic brake interlock for A-axis)
CN3-13 pin: MBR-C (Electromagnetic brake interlock for C-axis)
CN3-25 pin: MBR-B (Electromagnetic brake interlock for B-axis)
Refer to Name
and function
column.
Each
Setting
digit
Explanation
Initial
value
_ _ x x
Device selection
Refer to table 5.8 for settings.
05h
_ x _ _
For manufacturer setting
0h
x _ _ _
0h
Table 5.8 Selectable output devices
Setting
value
Output device
_ _ 0 0
Always off
_ _ 0 2
RD (Ready)
_ _ 0 3
ALM (Malfunction)
_ _ 0 4
INP (In-position)
_ _ 0 5
MBR (Electromagnetic brake interlock)
_ _ 0 7
TLC (Limiting torque)
_ _ 0 8
WNG (Warning)
_ _ 0 9
BWNG (Battery warning)
_ _ 0 A
SA (Speed reached)
_ _ 0 C
ZSP (Zero speed detection)
_ _ 0 F
CDPS (Variable gain selection)
_ _ 1 0
CLDS (During fully closed loop control)
_ _ 1 1
ABSV (Absolute position undetermined)
_ _ 1 7
MTTR (During tough drive)
PD08
*DO2
Output device selection 2
You can assign any output device to the CN3-24 pin for each axis. CINP (AND in-
position) is assigned to all the axes in the initial setting.
The devices that can be assigned and the setting method are the same as in [Pr.
PD07].
Refer to Name
and function
column.
Common
Setting
digit
Explanation
Initial
value
_ _ x x
Device selection
Refer to table 5.8 in [Pr. PD07] for settings.
04h
_ x _ _
All-axis output condition selection
0: AND output
When all axes of A, B, and C meet a condition, the
device will be enabled (on or off).
1: OR output
When each axis of A, B, or C meet a condition, the
device will be enabled (on or off).
The digit will be enabled when "All axes (0 _ _ _)" is
selected.
0h
x _ _ _
Output axis selection
0: All axes
1: A-axis
2: B-axis
3: C-axis
0h
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...






































































