



























16. FULLY CLOSED LOOP SYSTEM
16 - 4
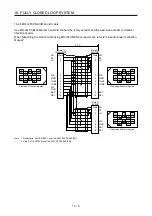
16.1.3 System configuration
(1) For a linear encoder
CN2B
CN2A
Servo amplifier
SSCNET III/H controller
SSCNET III/H
Position command
Control signal
Table
To the next servo amplifier
(Note)
Two-wire type serial interface compatible linear encoder
Load-side encoder signal
Servo motor encoder signal
Linear encoder head
Servo motor
Note. Applicable for the absolute position detection system when an absolute position linear encoder is used.
In that case, a battery is not required.
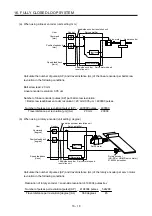
(2) For a rotary encoder
CN2B
CN2A
Servo motor
Two-wire type rotary encoder
HG-KR or HG-MR servo motor
(4194304 pulses/rev)
Drive part
Servo amplifier
SSCNET III/H controller
SSCNET III/H
Position command
Control signal
To the next servo
amplifier
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































