


























7. SPECIAL ADJUSTMENT FUNCTIONS
7 - 17
7.2.3 Parameter
When using the gain switching function, always select "Manual mode (_ _ _ 3)" of "Gain adjustment mode
selection" in [Pr. PA08 Auto tuning mode]. The gain switching function cannot be used in the auto tuning
mode.
(1) Parameter for setting gain switching condition
Parameter Symbol
Name
Unit
Description
PB26
CDP
Gain switching function
Select a switching condition.
PB27
CDL
Gain switching condition
[kpulse/s]
/[pulse]
/[r/min]
Set a switching condition values.
PB28
CDT
Gain switching time constant
[ms]
Set the filter time constant for a gain switch at switching.
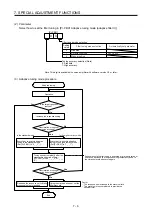
(a) [Pr. PB26 Gain switching function]
Set gain switching conditions. Select the switching condition in the first to third digits.
Gain switching selection
0: Disabled
1: Control command from controller is enabled
2: Command frequency
3: Droop pulses
4: Servo motor speed/linear servo motor speed
0
Gain switching condition
0: Gain after switching is enabled with gain switching condition or more
1: Gain after switching is enabled with gain switching condition or less
[Pr. PB26]
Gain switching time constant disabling condition selection (Note)
0: Switching time constant enabled
1: Switching time constant disabled
2: Return time constant disabled
Note. This digit is available with servo amplifier with software version B4 or later.
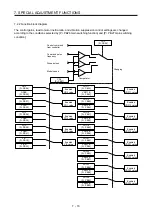
(b) [Pr. PB27 Gain switching condition]
Set a level to switch gains with [Pr. PB27] after you select "Command frequency", "Droop pulses", or
"Servo motor speed/linear servo motor speed" with the gain switching selection in [Pr. PB26 Gain
switching function].
The setting unit is as follows.
Gain switching condition
Unit
Command frequency
[kpulse/s]
Droop pulses
[pulse]
Servo motor speed/linear servo motor speed
[r/min]/[mm/s]
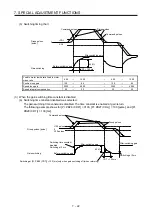
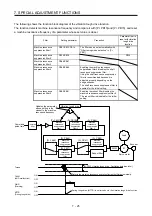
(c) [Pr. PB28 Gain switching time constant]
You can set the primary delay filter to each gain at gain switching. Use this parameter to suppress
shock given to the machine if the gain difference is large at gain switching, for example.
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































