




























14. USING A LINEAR SERVO MOTOR
14 - 18
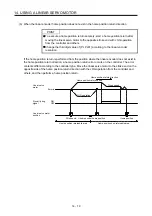
In the case of a proximity dog type home position return, the nearest reference home position after
proximity dog off is the home position.
Set one linear encoder home position in the full stroke, and set it in the position that can always be
passed through after a home position return start. LZ (Encoder Z-phase pulse) cannot be used.
When two or more reference marks exist during the full stroke of the linear encoder, select "Enabled
(_ _ 1 _)" of "Linear scale multipoint Z-phase input function selection" in [Pr. PC17].
Linear encoder home position
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Linear servo
motor
Reference home
position
Linear servo motor
position
0 mm/s
(Note)
1048576 pulses
1048576 pulses × n
Note. Changeable with [Pr. PL01].
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































