





























15. USING A DIRECT DRIVE MOTOR
15 - 22
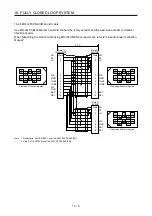
(b) Dynamic brake time constant
The following shows necessary dynamic brake time constant
τ
for the equation (15.1).
Ti
me
c
o
n
sta
n
t
τ
[ms]
Speed [r/min]
0
0
100
200
5
15
20
25
30
300
400
500
006
004
10
002
0
0
100
200
70
300
400
500
012
006
018
10
20
30
40
50
60
Speed [r/min]
T
im
e
constant
τ
[ms]
TM-RFM_C20 TM-RFM_E20
Speed [r/min]
T
ime const
ant
τ
[ms]
0
0
10
30
40
50
60
20
012
100
200
300
400
500
Speed [r/min]
0
0
60
040
50
100
150
200
70
80
50
40
30
20
10
T
im
e
const
ant
τ
[ms]
TM-RFM_G20 TM-RFM_J10
0
0
25
30
20
15
10
5
0
100
200
300
400
500
600
Speed [r/min]
T
ime cons
tant
τ
[ms]
0
0
5
15
20
25
30
10
0
100
200
300
400
500
600
Speed [r/min]
T
im
e
const
ant
τ
[ms]
TM-RG2M002C30
TM-RU2M002C30
TM-RG2M004E30
TM-RU2M004E30
0
0
60
70
80
50
40
30
20
10
0
100
200
300
400
500
600
Speed [r/min]
T
ime c
onstant
τ
[ms]
TM-RG2M009G30
TM-RU2M009G30
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































