




























14. USING A LINEAR SERVO MOTOR
14 - 24
(2) Servo system controller setting
(a) Setting precautions
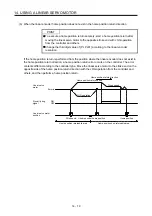
The following parameters will be enabled by turning the servo amplifier power off and on again after
the controller writes the parameters to the servo amplifier.
Setting item
Setting
Motion controller
R_MTCPU/Q17_DSCPU
Simple motion module
RD77MS_/QD77MS_/
LD77MS_
Command resolution
Linear encoder resolution unit
Parameter
Servo amplifier setting
MR-J4-B Linear
Motor setting
Automatic setting
No.
(Note)
Symbol
Name
Initial
value
PA01 **STY Operation
mode
1000h
1040h
PC01
ERZ
Error excessive alarm level
0
Set the items as required.
PC03 *ENRS Encoder output pulse selection
0000h
PC27 **COP9 Function selection C-9
0000h
PL01 **LIT1
Linear servo motor/DD motor function
selection 1
0301h
PL02
**LIM
Linear encoder resolution - Numerator
1000
PL03 **LID
Linear encoder resolution -
Denominator
1000
PL04 *LIT2
Linear servo motor/DD motor function
selection 2
0003h
PL05
LB1
Position deviation error detection level
0
PL06
LB2
Speed deviation error detection level
0
PL07 LB3
Torque/thrust deviation error detection
level
100
PL08 *LIT3
Linear servo motor/DD motor function
selection 3
0010h
PL09
LPWM Magnetic pole detection voltage level
30
PL17 LTSTS
Magnetic pole detection - Minute
position detection method - Function
selection
0000h
PL18 IDLV
Magnetic pole detection - Minute
position detection method -
Identification signal amplitude
0
Positioning
control
parameter
Unit setting
mm
Number of pulses (AP)
Travel distance (AL)
Refer to (2) (b) in this section.
Note. The parameter whose symbol is preceded by * is enabled with the following conditions:
* : After setting the parameter, power off and on the servo amplifier or reset the controller.
**: After setting the parameter, cycle the power of the servo amplifier.
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































