




























7. SPECIAL ADJUSTMENT FUNCTIONS
7 - 32
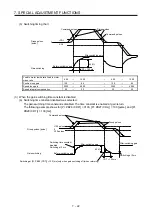
7.5 Model adaptive control disabled
POINT
Change the parameters while the servo motor stops.
When setting auto tuning response ([Pr. PA09]), change the setting value one by
one to adjust with checking operation status of the servo motor.
This is used by servo amplifiers with software version B4 or later. Check the
software version with MR Configurator2.
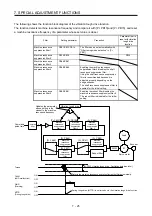
(1) Summary
The servo amplifier has a model adaptive control. The servo amplifier has a virtual motor model and
drives the servo motor following the output of the motor model in the model adaptive control. At model
adaptive control disabled, the servo amplifier drives motor with PID control without using the model
adaptive control.
The following parameters are available at model adaptive control disabled.
Parameter Symbol
Name
PB08
PG2
Position loop gain
PB09
VG2
Speed loop gain
PB10
VIC
Speed integral compensation
(2) Parameter setting
Set [Pr. PB25] to "_ _ _ 2".
(3) Restrictions
The following functions are not available at model adaptive control disabled.
Function Explanation
Forced stop deceleration function
([Pr. PA04])
Disabling the model adaptive control while the forced stop
deceleration function is enabled, [AL. 37] will occur.
The forced stop deceleration function is enabled at factory
setting. Set [Pr. PA04] to "0 _ _ _" (forced stop
deceleration function disabled).
Vibration suppression control 1
([Pr. PB02]/[Pr. PB19]/[Pr. PB20])
Vibration suppression control 2
([Pr. PB02]/[Pr. PB52]/[Pr. PB53])
The vibration suppression control uses the model adaptive
control. Disabling the model adaptive control will also
disable the vibration suppression control.
Overshoot amount compensation
([Pr. PB12])
The overshoot amount compensation uses data used by
the model adaptive control. Disabling the model adaptive
control will also disable the overshoot amount
compensation.
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































