





























5. PARAMETERS
5 - 17
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
Each/
Common
PA14
*POL
Rotation direction selection/travel direction selection
Select command input pulses of the rotation direction or the travel direction of the
rotary servo motor, the linear servo motor and the direct drive motor.
0
0 to 1
Each
Setting
value
Servo motor rotation direction/linear servo motor travel direction
Positioning address increase
Positioning address decrease
0
CCW or positive direction
CW or negative direction
1
CW or negative direction
CCW or positive direction
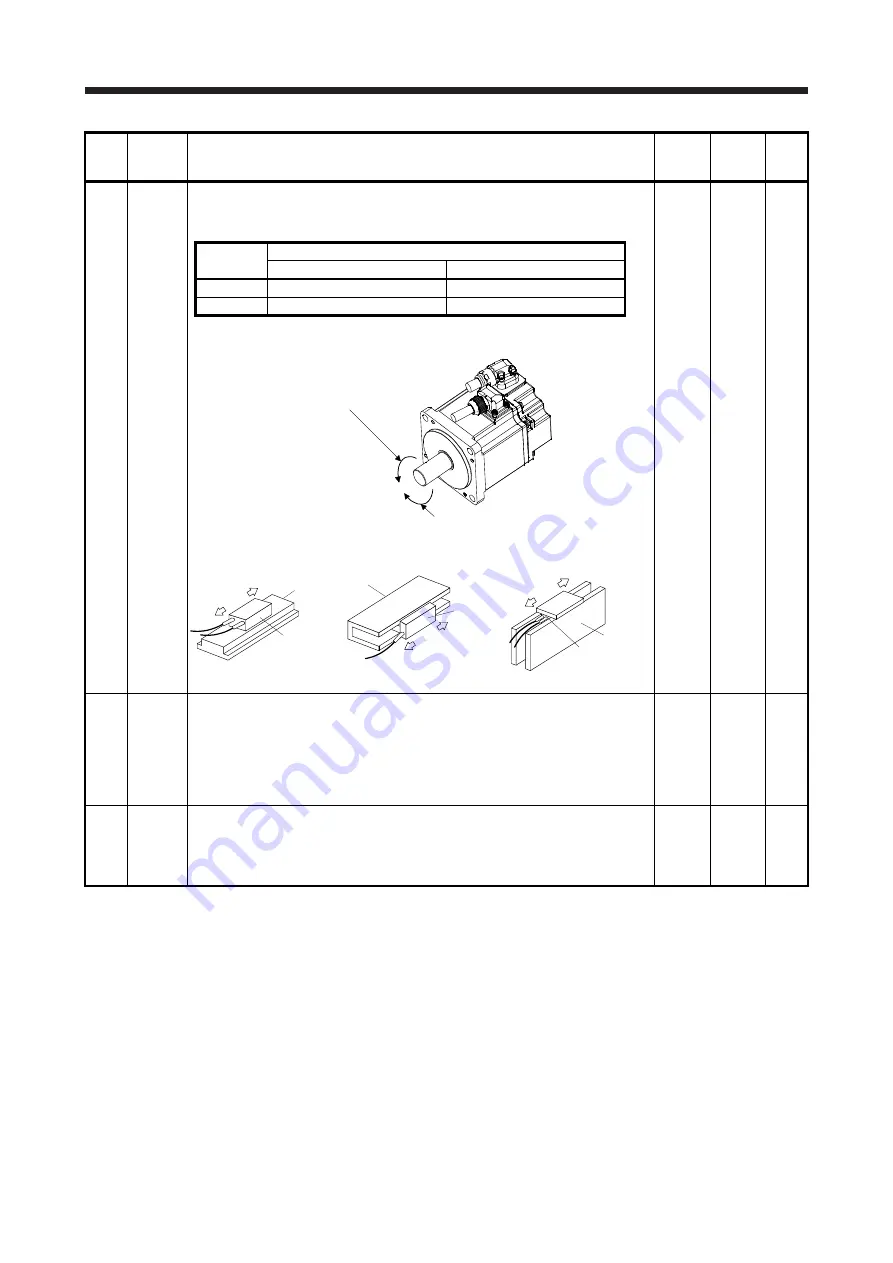
The following shows the servo motor rotation directions.
Forward rotation (CCW)
Reverse rotation (CW)
The positive/negative directions of the linear servo motor are as follows.
Secondary side
Primary side
Positive direction
Negative direction
LM-H3 series
Negative direction
Positive direction
Secondary side
Primary side
LM-U2 series
Negative direction
Positive direction
Table
Primary side
Secondary side
LM-K2 series
PA15
*ENR
Encoder output pulses
Set the encoder output pulses from the servo amplifier by using the number of output
pulses per revolution, dividing ratio, or electronic gear ratio. (after multiplication by 4)
Set a numerator of the electronic gear, for when selecting "A-phase/B-phase pulse
electronic gear setting (_ _ 3 _)" of "Encoder output pulse setting selection" in [Pr.
PC03].
The maximum output frequency is 4.6 Mpulses/s. Set the parameter within this range.
4000
[pulse/
rev]
1 to
65535
Each
PA16
*ENR2 Encoder output pulses 2
Set a denominator of the electronic gear for the A/B-phase pulse output. Set a
denominator of the electronic gear, for when selecting "A-phase/B-phase pulse
electronic gear setting (_ _ 3 _)" of "Encoder output pulse setting selection" in [Pr.
PC03].
1
1 to
65535
Each
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































