


























3. SIGNALS AND WIRING
3 - 3
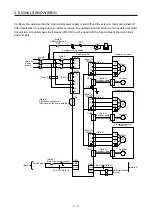
Configure the wiring so that the main circuit power supply is shut off and the servo-on command turned off
after deceleration to a stop due to an alarm occurring, an enabled servo forced stop, or an enabled controller
forced stop. A molded-case circuit breaker (MCCB) must be used with the input cables of the main circuit
power supply.
L1
L2
L3
(Note 7)
Power
supply
Servo amplifier
P+
L11
L21
N-
D
C
U
V
W
(Note 1)
CNP1
CNP3A
CNP2
A-axis servo motor
U
V
W
M
Motor
Encoder
CN2A
(Note 2)
Encoder cable
(Note 2)
Encoder cable
(Note 2)
Encoder cable
Forced stop 2
(Note 4)
AND malfunction
(Note 3)
(Note 4)
MCCB
OFF
MC
ON
MC
(Note 3)
AND malfunction
RA1
Emergency stop switch
SK
(Note 6)
MC
(Note 5)
(Note 12)
(Note 12)
(Note 12)
CN8
(Note 9)
Short-circuit connector
(Packed with the servo amplifier)
(Note 8)
Main circuit power supply
PE ( )
CNP3B
B-axis servo motor
U
V
W
Motor
Encoder
CN2B
(Note 5)
(Note 5)
M
U
V
W
CNP3C
C-axis servo motor
(Note 11)
U
V
W
Motor
Encoder
CN2C
M
U
V
W
(Note 10)
24 V DC (Note 13)
EM2
DICOM
CN3
CALM
DOCOM
24 V DC (Note 13)
CN3
RA1
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































