



























16. FULLY CLOSED LOOP SYSTEM
16 - 10
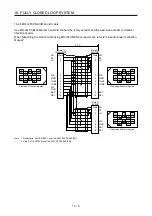
(4) Setting of feedback pulse electronic gear
POINT
If an incorrect value is set in the feedback pulse electronic gear ([Pr. PE04], [Pr.
PE05], [Pr. PE34], and [Pr. PE35]), [AL. 37 Parameter error] and an abnormal
operation may occur. Also, it may cause [AL. 42.1 Fully closed loop control error
by position deviation] during the positioning operation.
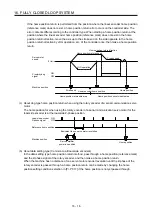
Set the numerator ([Pr. PE04] and [Pr. PE34]) and denominator ([Pr. PE05] and [Pr. PE35]) of the
electronic gear to the servo motor-side encoder pulse. Set the electronic gear so that the number of
servo motor encoder pulses per servo motor revolution is converted to the number of load-side encoder
pulses. The relational expression is shown below.
[Pr. PE04] × [Pr. PE34]
[Pr. PE05] × [Pr. PE35]
Number of motor encoder pulses per servo motor revolution
Number of load side encoder pulses per servo motor revolution
=
Select the load-side encoder so that the number of load-side encoder pulses per servo motor revolution
is within the following range.
4096 (2
12
)
≤
Number of load-side encoder pulses per servo motor revolution
≤
67108864 (2
26
)
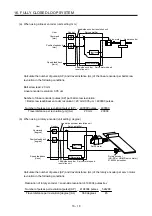
(a) When the servo motor is directly coupled with a ball screw and the linear encoder resolution is 0.05
μ
m
Conditions
Servo motor resolution: 4194304 pulses/rev
Servo motor reduction ratio: 1/11
Ball screw lead: 20 mm
Linear encoder resolution: 0.05 µm
Geared servo motor
Table
Linear encoder
Linear encoder head
Calculate the number of linear encoder pulses per ball screw revolution.
Number of linear encoder pulses per ball screw revolution
= Ball screw lead/linear encoder resolution
= 20 mm/0.05 µm = 400000 pulses
[Pr. PE04] × [Pr. PE34]
[Pr. PE05] × [Pr. PE35]
400000
4194304
3125
32768
1
11
=
1
11
=
×
×
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































