

























18. MR-J4W2-0303B6 SERVO AMPLIFIER
18 - 4
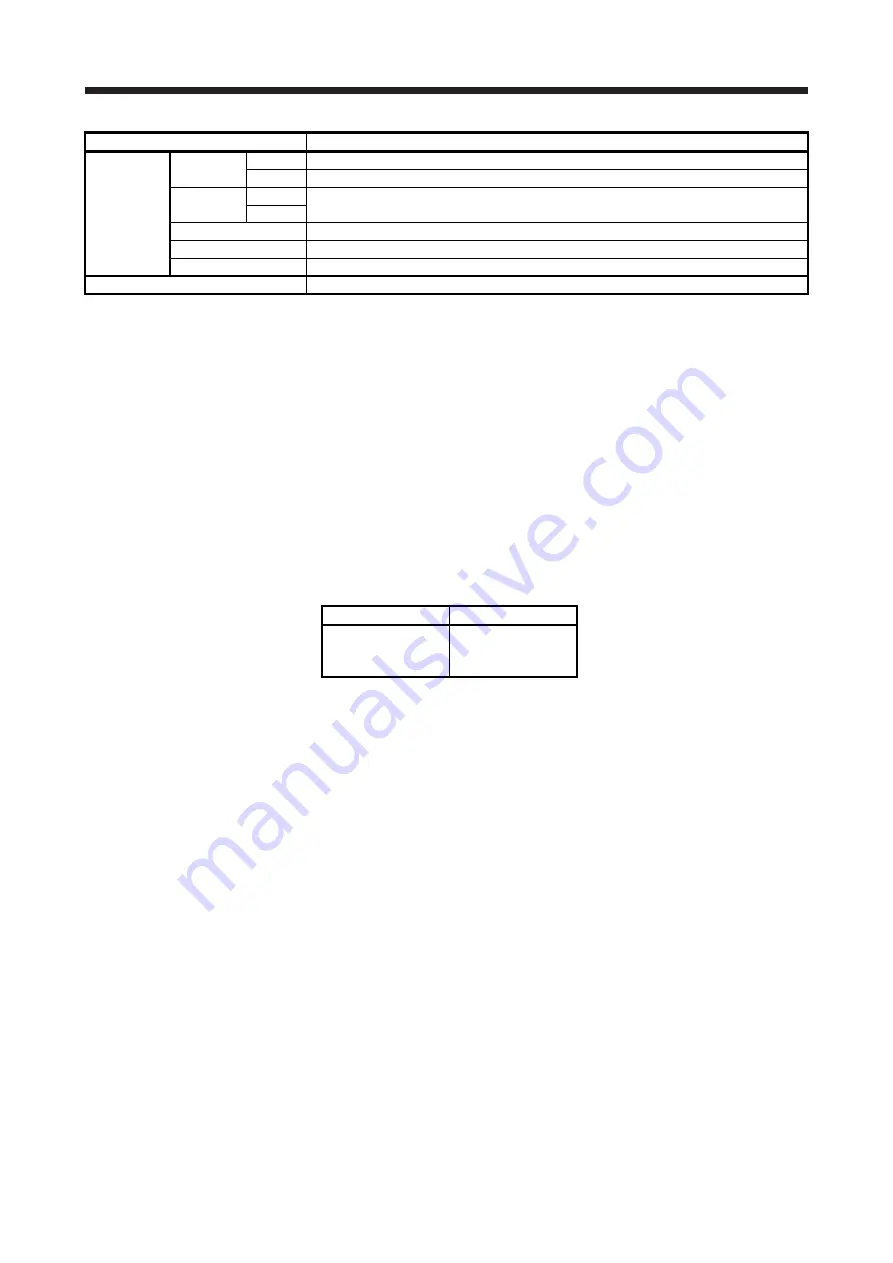
Model MR-J4W2-0303B6
Environment
Ambient
temperature
Operation 0
˚
C to 55
˚
C (non-freezing)
Storage -20
˚
C to 65
˚
C (non-freezing)
Ambient
humidity
Operation
5 %RH to 90 %RH (non-condensing)
Storage
Ambience
Indoors (no direct sunlight); no corrosive gas, inflammable gas, oil mist or dust
Altitude
1000 m or less above sea level
Vibration resistance
5.9 m/s
2
, at 10 Hz to 55 Hz (directions of X, Y and Z axes)
Mass [kg]
0.3
Note 1. Initial value is the 48 V DC. For 24 V DC, set [Pr. PC05] to "_ 1 _ _". The characteristics of the servo motor vary depending on
whether 48 V DC or 24 V DC is used. For details, refer to "Servo Motor Instruction Manual (Vol. 3)".
2. 0.25 A is the value applicable when all I/O signals are used. The current capacity can be decreased by reducing the number of
I/O points.
3. This is an electronic dynamic brake. This will not operate during control circuit power supply off. In addition, It may not operate
depending on the contents of alarms and warnings. Refer to chapter 8 for details.
4. The communication cycle depends on the controller specifications and the number of axes connected.
5. When closely mounting the servo amplifiers, operate them at the ambient temperatures of 45
˚
C or lower, or the total effective
load ratio of 45 w or lower for the two axes.
6. Regenerative energy is generated when the machine, whose moment of inertia is equivalent to the permissible charging
amount, decelerates from the rated speed to stop.
7. This is moment of inertia when the motor decelerates from the rated speed to stop. This will be moment of inertia for two axes
when two motors decelerate simultaneously. And this will be moment of inertia for each axis when multiple motors do not
decelerate simultaneously.
18.1.4 Combinations of servo amplifiers and servo motors
Servo amplifier
Servo motor
MR-J4W2-0303B6
HG-AK0136
HG-AK0236
HG-AK0336
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...





































































