




























8. TROUBLESHOOTING
8 - 5
No. Name
Detail
No.
Detail name
Stop
method
(Note
2, 3)
Alarm deactivation
Process-
ing
system
(Note 8)
Stop
system
(Note 8)
Alarm
reset
CPU
reset
Cycling
the
power
Alarm
34
SSCNET receive
error 1
34.1 SSCNET receive data error
SD
(Note 5)
Common All axes
34.2
SSCNET connector connection
error
SD
Common All axes
34.3
SSCNET communication data
error
SD
Each
axis
Each
axis
34.4 Hardware error signal detection
SD
Common All axes
34.5
SSCNET receive data error
(safety observation function)
SD
34.6
SSCNET communication data
error (safety observation
function)
SD
35
Command
frequency error
35.1 Command frequency error
SD
Each
axis
Each
axis
36
SSCNET receive
error 2
36.1
Continuous communication
data error
SD
Each
axis
Each
axis
36.2
Continuous communication
data error (safety observation
function)
SD
37 Parameter
error
37.1 Parameter setting range error
DB
Each
axis
Each
axis
37.2 Parameter combination error
DB
Each
axis
Each
axis
37.3 Point table setting error
DB
39 Program
error
39.1 Program
error
DB
39.2
Instruction argument external
error
DB
39.3 Register No. error
DB
39.4
Non-correspondence instruction
error
DB
3A
Inrush current
suppression circuit
error
3A.1
Inrush current suppression
circuit error
EDB
Common All axes
3D
Parameter setting
error for driver
communication
3D.1
Parameter combination error
for driver communication on
slave
DB
3D.2
Parameter combination error
for driver communication on
master
DB
3E
Operation mode
error
3E.1 Operation mode error
DB
Each
axis
Each
axis
3E.6 Operation mode switch error
DB
42
Servo control error
(for linear servo
motor and direct
drive motor)
42.1
Servo control error by position
deviation
EDB (Note 4) (Note 4)
Each
axis
Each
axis
42.2
Servo control error by speed
deviation
EDB (Note 4) (Note 4)
Each
axis
Each
axis
42.3
Servo control error by
torque/thrust deviation
EDB (Note 4) (Note 4)
Each
axis
Each
axis
Fully closed loop
control error
(for fully closed
loop control)
42.8
Fully closed loop control error
by position deviation
EDB (Note 4) (Note 4)
Each
axis
Each
axis
42.9
Fully closed loop control error
by speed deviation
EDB (Note 4) (Note 4)
Each
axis
Each
axis
42.A
Fully closed loop control error
by position deviation during
command stop
EDB (Note 4) (Note 4)
Each
axis
Each
axis
45
Main circuit device
overheat
45.1
Main circuit device overheat
error 1
SD
(Note 1)
(Note 1)
(Note 1)
Common All axes
45.2
Main circuit device overheat
error 2
SD
(Note 1)
(Note 1)
(Note 1)
Common All axes
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
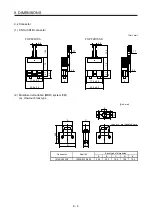
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































