


























3. SIGNALS AND WIRING
3 - 16
Device
Symbol
Function and application
AND ready
CRD
Enabling servo-on to make the servo amplifier ready to operate will turn on RD.
OR ready
XRD
Common ready for A-
axis
RD-A
Common ready for B-
axis
RD-B
Common ready for C-
axis
RD-C
AND speed reached
CSA
SA will turn off during servo-off. When the servo motor speed reaches the following range, SA will
turn on.
Set speed ± ((Set speed × 0.05) + 20) r/min
When the preset speed is 20 r/min or less, SA always turns on.
The device cannot be used in the position control mode and torque control mode.
OR speed reached
XSA
Speed reached for A-
axis
SA-A
Speed reached for B-
axis
SA-B
Speed reached for C-
axis
SA-C
AND limiting speed
CVLC
When the speed reaches the speed limit value in the torque control mode, VLC will turn on. When
the servo is off, TLC will be turned off.
The device cannot be used in the position control mode and speed control mode.
OR limiting speed
XVLC
Limiting speed for A-
axis
VLC-A
Limiting speed for B-
axis
VLC-B
Limiting speed for C-
axis
VLC-C
AND zero speed
detection
CZSP
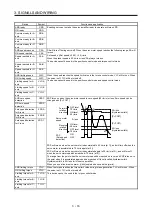
ZSP turns on when the servo motor speed is zero speed (50 r/min) or less. Zero speed can be
changed with [Pr. PC07].
OFF
ON
Servo motor
speed
20 r/min
(Hysteresis width)
[Pr. PC07]
20 r/min
(Hysteresis width)
OFF level
-70 r/min
ON level
-50 r/min
ON level
50 r/min
OFF level
70 r/min
0 r/min
[Pr. PC07]
ZSP
(Zero speed
detection)
1)
3)
2)
4)
Forward
rotation
direction
Reverse
rotation
direction
ZSP will turn on when the servo motor is decelerated to 50 r/min (at 1)), and will turn off when the
servo motor is accelerated to 70 r/min again (at 2)).
ZSP will turn on when the servo motor is decelerated again to 50 r/min (at 3)), and will turn off
when the servo motor speed has reached -70 r/min (at 4)).
The range from the point when the servo motor speed has reached on level, and ZSP turns on, to
the point when it is accelerated again and has reached off level is called hysteresis width.
Hysteresis width is 20 r/min for this servo amplifier.
When you use a linear servo motor, [r/min] explained above will be [mm/s].
OR zero speed
detection
XZSP
Zero speed detection
for A-axis
ZSP-A
Zero speed detection
for B-axis
ZSP-B
Zero speed detection
for C-axis
ZSP-C
AND limiting torque
CTLC
When the torque reaches the torque limit value during torque generation, TLC will turn on. When
the servo is off, TLC will be turned off.
This device cannot be used in the torque control mode.
OR limiting torque
XTLC
Limiting torque for A-
axis
TLC-A
Limiting torque for B-
axis
TLC-B
Limiting torque for C-
axis
TLC-C
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...