
























17. APPLICATION OF FUNCTIONS
17 - 66
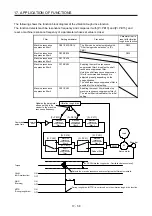
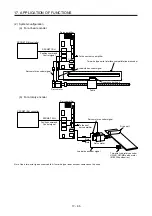
(2) System configuration
(a) For a linear encoder
CN2B
CN2A
Servo amplifier
SSCNET III/H controller
SSCNET III/H
Position command
Control signal
Table
To the next servo amplifier
Two-wire type serial interface compatible linear encoder
Load-side encoder signal
Servo motor encoder signal
Linear encoder head
Servo motor
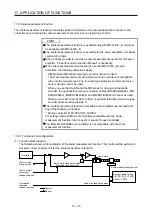
(b) For a rotary encoder
CN2B
CN2A
(Note)
(Note)
Servo motor
Two-wire type rotary encoder
HG-KR, HG-MR servo motor
(4194304 pulses/rev)
Drive part
Servo amplifier
SSCNET III/H controller
SSCNET III/H
Position command
Control signal
To the next
servo amplifier
Servo motor encoder signal
Load-side encoder signal
Note. Use a two-wire type encoder cable. A four-wire type linear encoder cable cannot be used.
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































