




























5. PARAMETERS
5 - 37
5.2.3 Extension setting parameters ([Pr. PC_ _ ])
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
Each/
Common
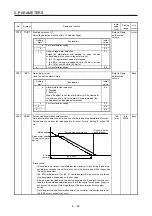
PC01
ERZ
Error excessive alarm level
Set an error excessive alarm level.
Set this per rev. for rotary servo motors and direct drive motors. Setting "0" will be 3
rev. Setting over 200 rev will be clamped with 200 rev.
Set this per mm for linear servo motors. Setting "0" will be 100 mm.
0
[rev]/
[mm]
(Note)
0 to
1000
Each
Note. Setting can be changed in [Pr. PC06].
PC02
MBR
Electromagnetic brake sequence output
Set a delay time between MBR (Electromagnetic brake interlock) and the base drive
circuit is shut-off.
0
[ms]
0 to
1000
Each
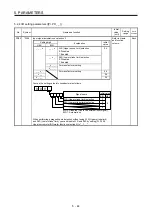
PC03
*ENRS Encoder output pulse selection
Select an encoder pulse direction and encoder output pulse setting. This parameter is
not available with C-axis.
Refer to Name
and function
column.
Each
Setting
digit
Explanation
Initial
value
_ _ _ x
Encoder output pulse phase selection
0: Increasing A-phase 90° in CCW or positive direction
1: Increasing A-phase 90° in CW or negative direction
0h
Setting
value
Servo motor rotation direction/
linear servo motor travel direction
CCW or positive
direction
CW or negative
direction
0
A-phase
B-phase
A-phase
B-phase
1
A-phase
B-phase
A-phase
B-phase
_ _ x _
Encoder output pulse setting selection
0: Output pulse setting
When "_ 1 0 _" is set to this parameter, [AL. 37
Parameter error] will occur.
1: Division ratio setting
3: A/B-phase pulse electronic gear setting
For linear servo motors, selecting "0" will output as division
ratio setting because the output pulse setting is not
available.
0h
_ x _ _
Selection of the encoders for encoder output pulse
Select an encoder used the encoder output pulses which
the servo amplifier outputs.
0: Servo motor encoder
1: Load-side encoder
When "_ 1 0 _" is set to this parameter, [AL. 37
Parameter error] will occur.
Use [Pr. PA16] only in the fully closed loop system.
Selecting "1" in other than fully closed loop system or
standard control system (scale measurement function:
enabled) triggers [AL. 37 Parameter error].
0h
x _ _ _
For manufacturer setting
0h
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































