



























14. USING A LINEAR SERVO MOTOR
14 - 10
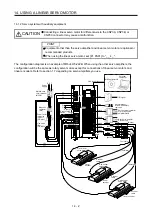
(b) Magnetic pole detection by the minute position detection method
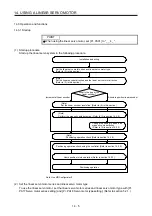
Is the travel distance during
the magnetic pole detection
acceptable? (Note 3)
1) Check that FLS (Upper stroke limit), RLS (Lower stroke limit), and EM2 (Forced stop 2) are on, and
then cycle the servo amplifier power.
Turn "On (up)" the test operation select switch (SW2-1) of the servo amplifier, and then cycle the
power of the servo amplifier.
Set [Pr. PL08 Linear servo motor/DD motor function selection 3] to "_ _ _ 4" to set the magnetic
pole detection method to "Minute position detection method".
Cycle the servo amplifier power.
6) With [Pr. PL17 Magnetic pole detection - Minute position detection method - Function selection],
set the load to mass of the linear servo motor primary-side ratio. (Note 2)
7) Execute "Positive direction travel" or "Negative direction travel" with "Positioning operation" in the
test operation mode on MR Configurator2. Set the travel distance to "0" at this time.
8) Set [Pr. PL01] to "_ _ _ 0" to set "Magnetic pole detection disabled". (Note 1)
2)
3)
4)
5)
The magnetic pole detection is carried out.
Is the response by the
minute position detection method of
[Pr. PL17] the final value?
Has an abnormal sound or
vibration occurred during the
magnetic pole detection?
Decrease the response by the minute
position detection method of [Pr. PL17] by
two as the final setting value.
Increase the response by the minute
position detection method of [Pr. PL17] by
one.
Not
acceptable
YES
Acceptable
NO
YES
NO
Magnetic pole detection
End
Set [Pr. PL01 Linear servo motor/DD motor function selection 1] to "_ _ _ 1" to enable "Magnetic
pole detection at first servo-on". (Note 1)
Note 1. When the linear encoder is an incremental type, the [Pr. PL01] setting is not required.
2. If the load to primary-side linear servo motor mass ratio is unknown, perform the magnetic pole
detection by the position detection method, and then perform the auto tuning to set an estimated value.
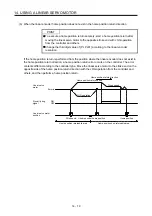
3. For the magnetic pole detection by the minute position detection method, the maximum travel distance
at the magnetic pole detection must be 0.5 mm or less. To shorten the travel distance, increase the
response by the minute position detection method in [Pr. PL17].
Summary of Contents for MR-J4W2-0303B6
Page 39: ...2 INSTALLATION 2 8 MEMO ...
Page 97: ...4 STARTUP 4 20 MEMO ...
Page 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Page 235: ...9 DIMENSIONS 9 6 MEMO ...
Page 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Page 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Page 556: ...APPENDIX App 41 ...
Page 585: ...MEMO ...







































































