





























356
Rockwell Automation Publication 2198-UM002E-EN-P - February 2018
Appendix D
Motor Control Feature Support
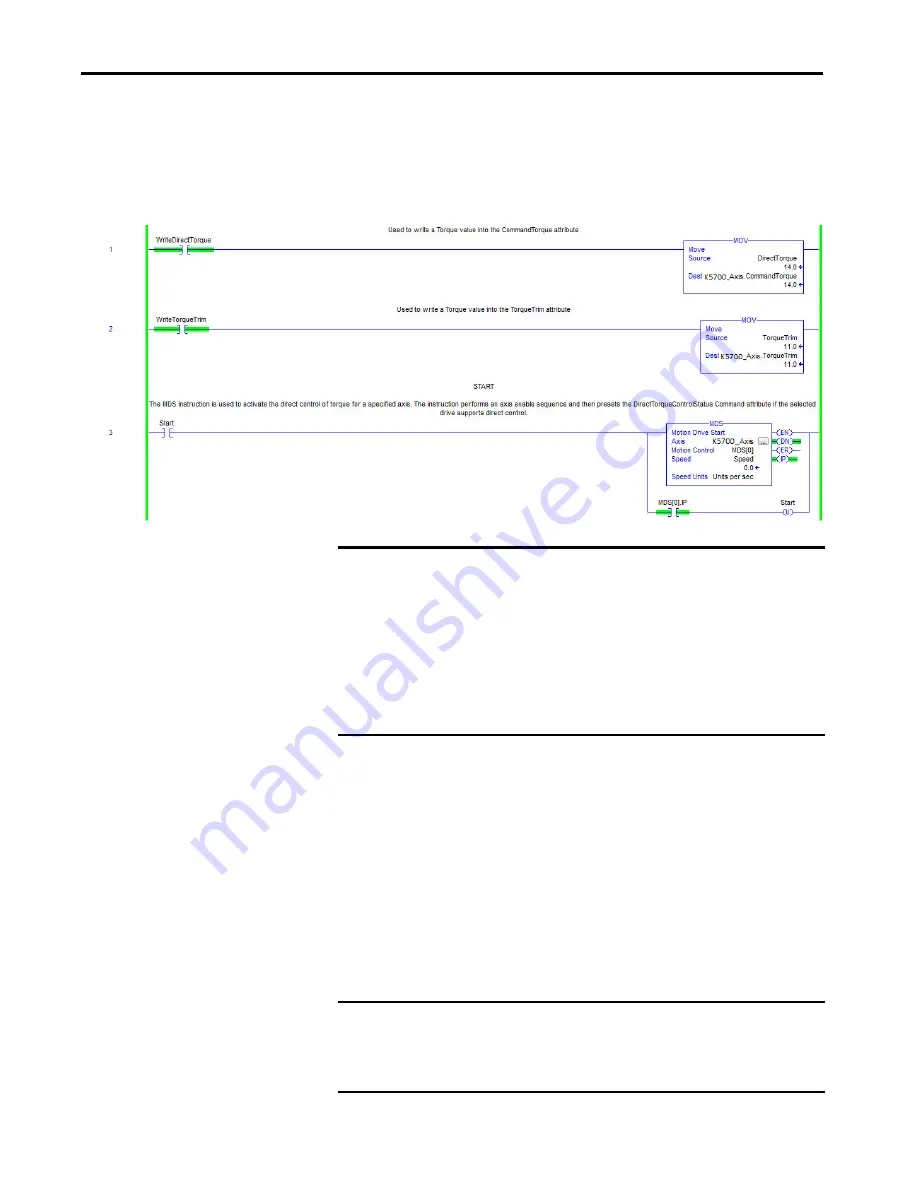
When the axis configuration is in Torque Loop, the Speed attribute within the
MDS instruction is not used to command the speed of the drive. The speed is
determined by the amount of torque specified in the CommandTorque and/or
TorqueTrim attributes.
Figure 182 - Torque Mode
Ramp Attributes
The MDS instruction is validated if the Integrated Motion on EtherNet/IP
drive device supports the following five ramp attributes:
• RampAcceleration
• RampDeceleration
• RampVelocity - Positive
• RampVelocity - Negative
• RampJerk - Control
IMPORTANT
You must command zero torque in the CommandTorque and TorqueTrim
attributes before you can use the Motion Axis Stop (MAS) instruction to stop
a specific motion process on an axis or to stop the axis completely. To use the
MAS instruction, you must set Change Decel to No. Otherwise, an instruction
error can occur. The deceleration rate is set based on the Ramp Deceleration
attribute. The Motion Servo Off (MSF) instruction is used to deactivate the
drive output for the specified axis and to deactivate the axis’ servo loop. If
you execute an MSF instruction while the axis is moving, the axis coasts to an
uncontrolled stop.
IMPORTANT
Ramp attributes are available only when the Kinetix 5700 drive axis
configuration is set to Frequency Control or Velocity Loop. Ramp attributes
are not available when the axis configuration is set to Torque Loop or
Position Loop.