





























Rockwell Automation Publication 2198-UM002E-EN-P - February 2018
345
Motor Control Feature Support
Appendix D
When configured for closed-loop control, the Dynamic test uses the velocity
regulator tuning as entered into the Logix Designer application. If the motor is
coupled to a load, the velocity regulator tuning may need to be adjusted to
make sure the velocity response is well controlled. The Dynamic test fails if the
steady-state velocity feedback is not within a ±30% tolerance of the
commanded velocity.
If using the Dynamic test in Frequency Control mode, uncouple the motor
from any load or results may not be valid. In closed-loop control, either a
coupled or uncoupled load produces valid results.
Selection of Motor Thermal
Models
The Kinetix 5700 drives contain two motor thermal-overload protection
algorithms that you can use to prevent the motor from overheating.
Generic Motors
The default thermal model is a generic I
2
T Class 10 overload protection
algorithm. This model is active if the MotorWindingToAmbientResistance or
the MotorWindingToAmbientCapacitance values are 0.0. The purpose of this
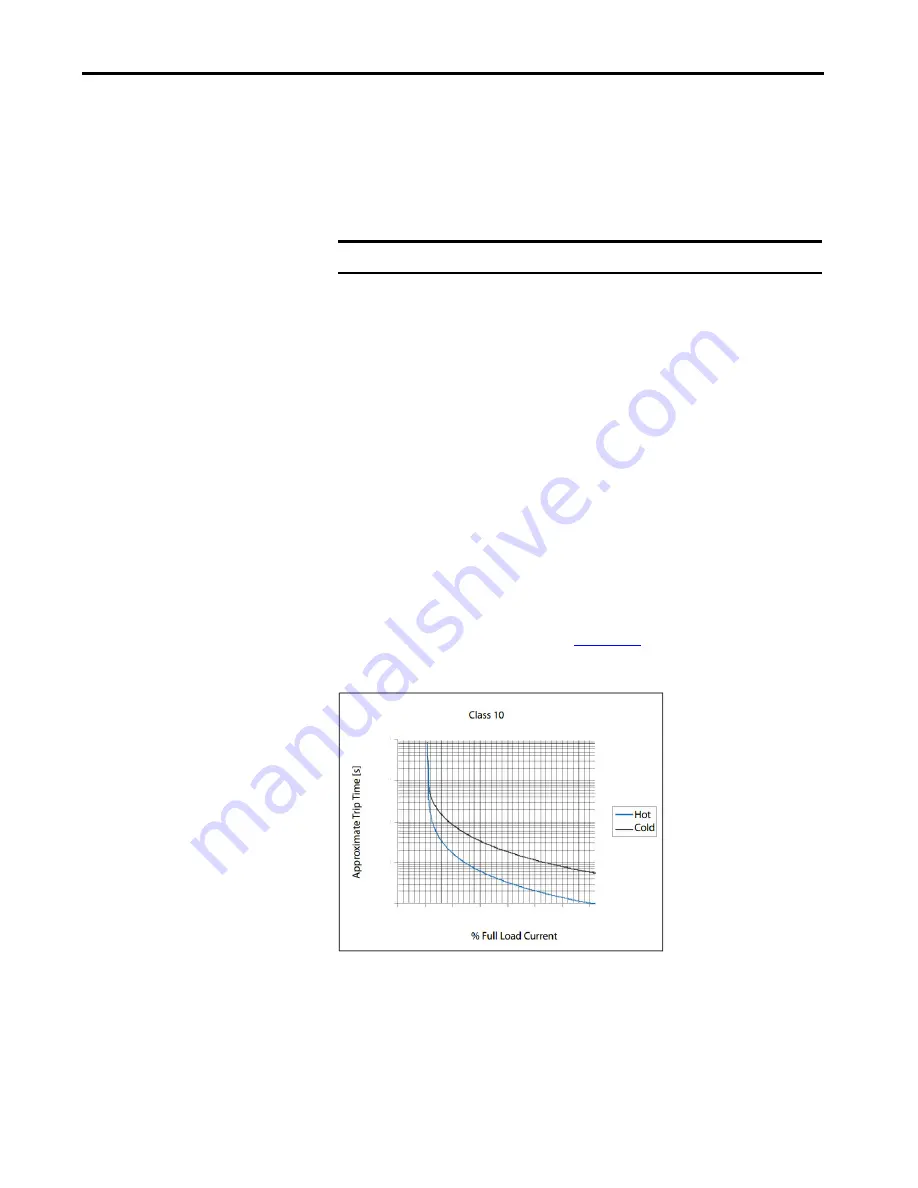
algorithm is to limit the time a motor is operating with excessive levels of
current. The relationship between Motor Overload Factory Limit trip-time
and motor output current is shown in
Figure 175 - Motor Overload Curve
You can use the MotorOverloadLimit attribute (default of 100%, max of
200%) to increase the motor overload trip-time by artificially increasing the
motor rated current (for thermal protection only). MotorOverloadLimit
should only be increased above 100% if cooling options are applied. Increasing
MotorOverloadLimit causes MotorCapacity to increase more slowly.
IMPORTANT
The Dynamic test is not supported in closed-loop Torque Control.
10
100
1000
10,000
100,000
100
125
150
175
200
225
250
0