





























Rockwell Automation Publication 2198-UM002E-EN-P - February 2018
265
Kinetix 5700 Safe Torque-off Function
Chapter 9
STO Fault Reset
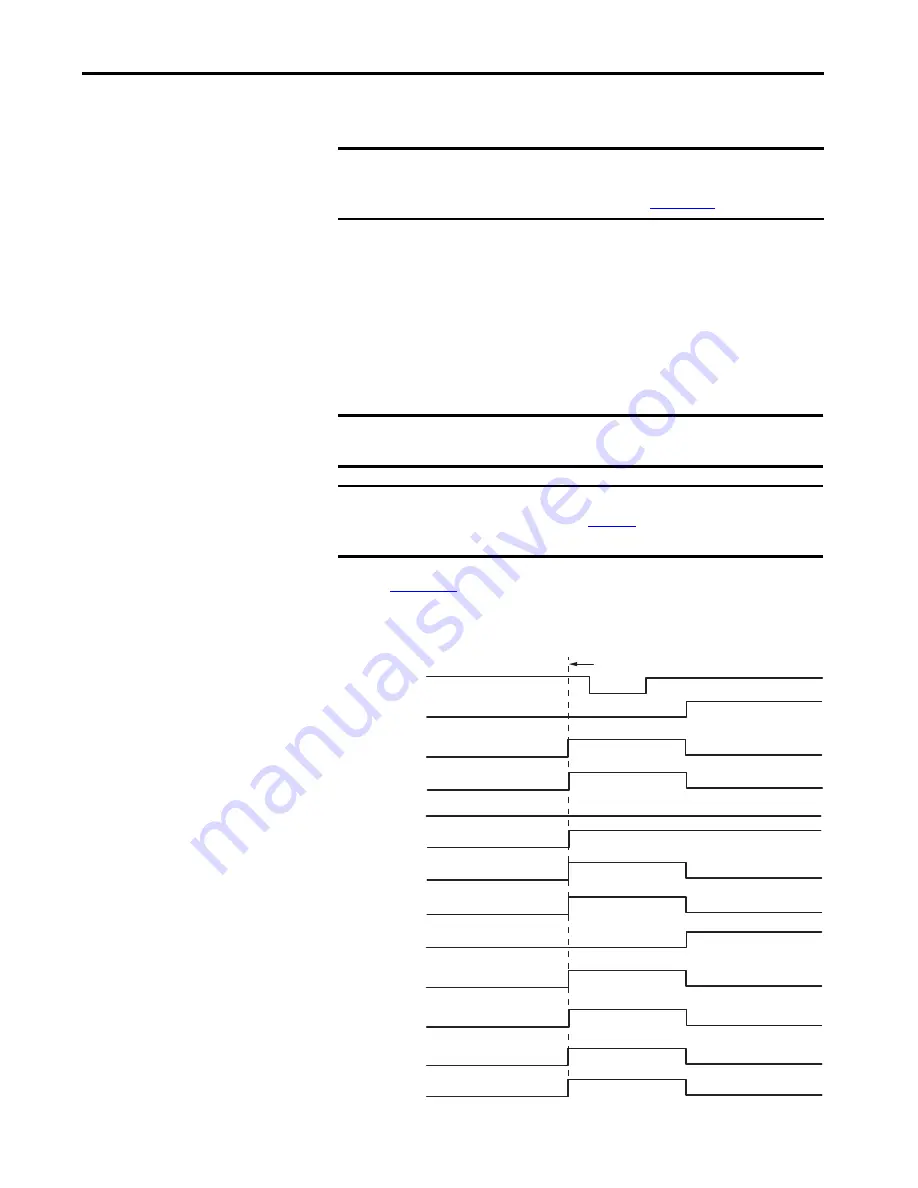
To clear the STO Fault condition, a transition from logic 0 to 1 of the
SO.Reset tag is required after the SO.SafeTorqueOff tag has transitioned from
logic 0 to 1.
If the Kinetix 5700 servo drive safety controller detects a fault, the input
assembly tag SI.SafetyFault is set to 1.
To reset Axis.SafetyFault, an MAFR command must be issued.
for an understanding of the Kinetix 5700 STO state restart
functionality.
Figure 116 - Reset Safe Torque-off Fault Diagram
IMPORTANT
This section applies to 2198-
xxxx
-ERS3 drives. For fault reset on
2198-
xxxx
-ERS4 drives, see the Kinetix 5700 Safe Monitor Functions
Safety Reference Manual, publication
.
IMPORTANT
Transition of the SO.SafeTorqueOff tag to logic 1 must always be
executed prior to transition of the SO.Reset tag to logic 1.
IMPORTANT
All Kinetix 5700 inverter axes enter the faulted state if any STO function
fault is detected. Refer to
for integrated safety
troubleshooting.
Drv:SO.SafeTorqueOff
Drv:SO.ResetRequest
Drv:SI.SafetyFault
Drv:SI.TorqueDisabled
Axis.SafeTorqueOffActiveStatus
Axis.SafeTorqueOffActiveInhibit
Axis.SafeTorqueDisabledStatus
Axis.SafetyResetRequestStatus
Axis.SafetyResetRequiredStatus
Disable Torque
Permit Torque
Torque Disabled
Torque Permited
No Fault
Drv:SI.ResetRequired
Reset Not Required
Axis.SafetyFault
No Fault
Faulted (cleared by MAFR)
Start Inhibitted
Start Permitted
Reset Not Required
Axis.SafetyFaultStatus
Faulted
No Fault
S0.ResetRequest
Reset Required
Disable Torque
Permit Torque
Torque Disabled
Torque Permited
Axis.SafeTorqueOffFault
No Fault
Safety Fault Occurs