





























CAN Control Registers
1552
SPRUH22I – April 2012 – Revised November 2019
Copyright © 2012–2019, Texas Instruments Incorporated
M3 Controller Area Network (CAN)
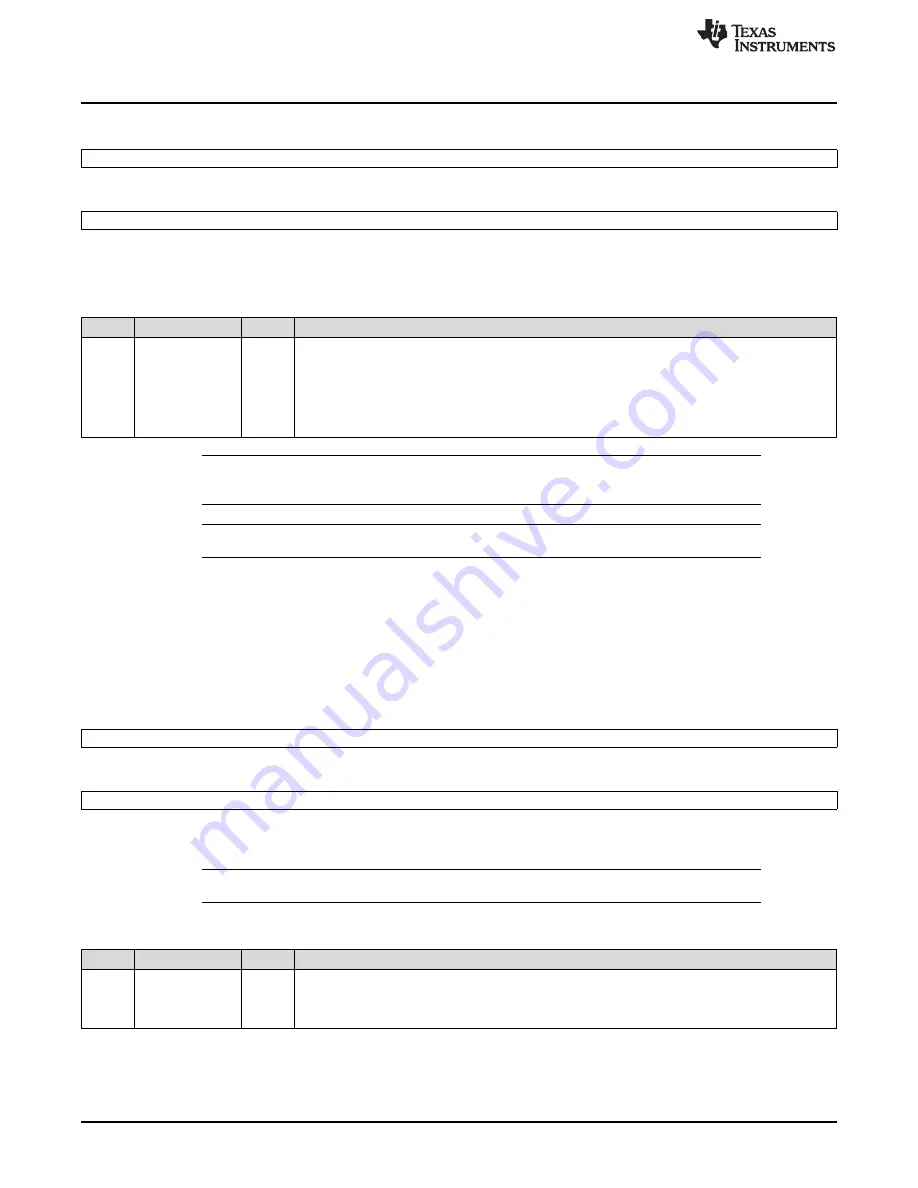
Figure 23-26. Auto-Bus-On Time Register (CAN ABOTR) [offset = 0x80]
31
16
ABO Time[31:16]
R/W-0
15
0
ABO Time[15:0]
R/W-0
LEGEND: R/W = Read/Write; -
n
= value after reset
Table 23-12. Auto-Bus-On Time Register Field Descriptions
Bit
Field
Value
Description
31-0
ABO Time
Number of clock cycles before a Bus-Off recovery sequence is started by clearing the Init bit.
"Clock" refers to the input clock to the CAN module. This function has to be enabled by setting bit
ABO in CAN Control Register.
The Auto-Bus-On timer is realized by a 32-bit counter which starts to count down to zero when the
module goes Bus-Off.
The counter will be reloaded with the preload value of the ABO Time register after this phase.
NOTE:
On write access to the CAN Control register while Auto-Bus-On timer is running, the Auto-
Bus-On procedure will be aborted.
NOTE:
During Debug mode, running Auto-Bus-On timer will be paused.
23.15.9 Transmission Request Registers (CAN TXRQ)
These registers hold the TxRqst bits of the implemented message objects. By reading out these bits, the
CPU can check for pending transmission requests. The TxRqst bit in a specific message object can be
set/reset by the CPU via the IF1 or IF2 Message Interface registers, or by the message handler after
reception of a remote frame or after a successful transmission.
Figure 23-27. Transmission Request Register (CAN TXRQ) [offset = 0x88]
31
16
TxRqst[31:16]
R-0
15
0
TxRqst[15:0]
R-0
LEGEND: R = Read; -
n
= value after reset
NOTE:
Bits 0 through 31 correspond to message object 1 through 32, respectively.
Table 23-13. Transmission Request Register Field Descriptions
Bit
Field
Value
Description
31-0
TxRqst[31:0]
Transmission Request Bits (for all message objects)
0
No transmission has been requested for this message object.
1
The transmission of this message object is requested and is not yet done.







































































