





























6.3Deceleration stop sequence
6-5
6.3 Deceleration stop sequence
Sets how to decelerate and stop the motor if main power is shut down or an alarm occurs while PDS is
Operation enabled state (servo-on state).
Combine the deceleration function (option code) defined by CoE(CiA402) and the deceleration function on
the servo (MINAS A6) side (dynamic brake stop, free-run stop, emergency stop).
Please refer to "TECHNICAL REFERENCE EtherCAT Communication Specification (SX-DSV03456)" for
details.
6.3.1 Sequence upon inputting of over-travel inhibition (POT, NOT)
Set up the operating sequence when the over-travel inhibition is input (POT, NOT).
In hm mode, there are following 2 modes: the mode for performing the reverse motion after stopping in
accordance with the Method that is specified and the mode in which the edge of POT/NOT is set as the
home position.
For details, refer to "TECHNICAL REFERENCE EtherCAT Communication Specification (SX-DSV03456)".
Set the over-travel inhibition input (POT, NOT) correctly. If it is set incorrectly (NOT for the
drive side in the positive direction, POT for the drive side in the negative direction, etc.),
operations cannot be guaranteed.
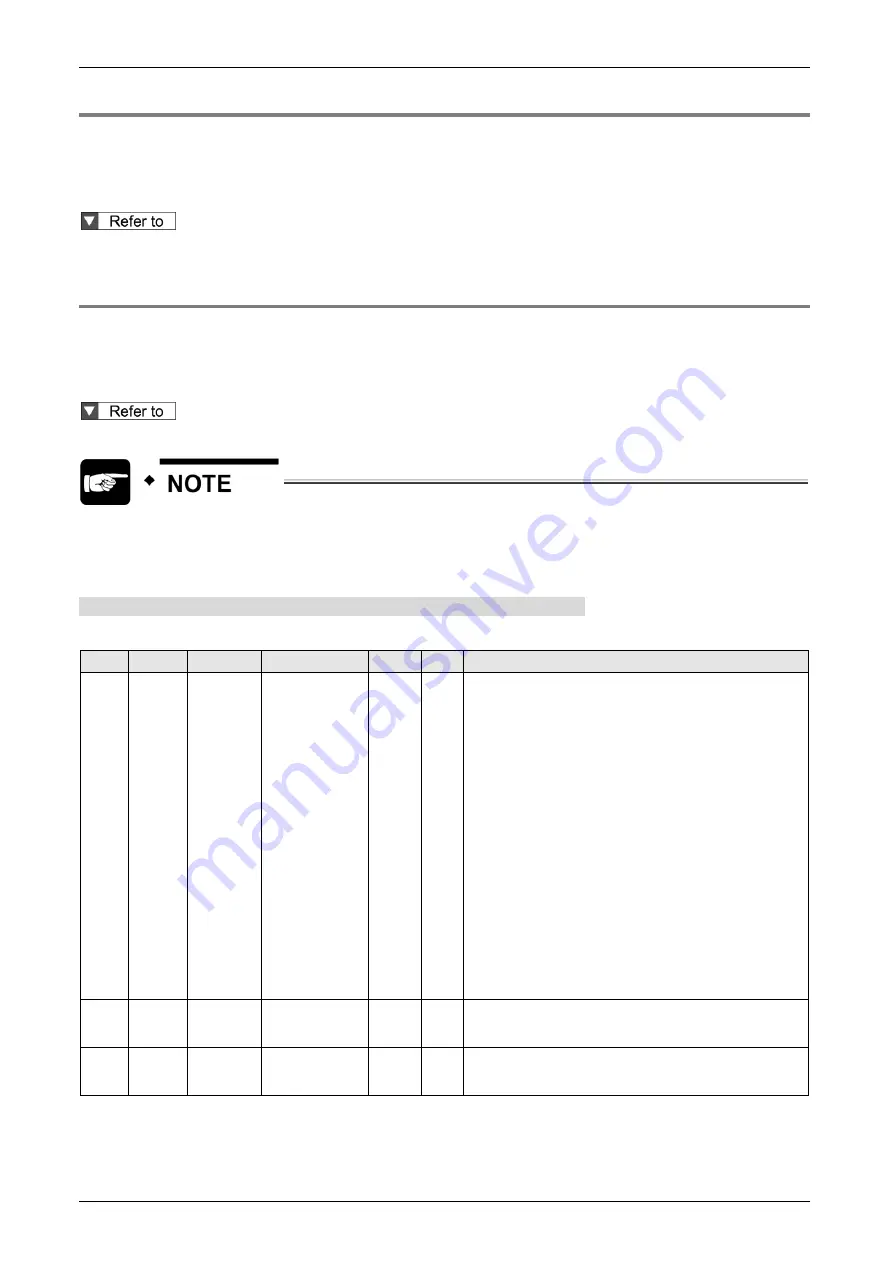
Relevant parameters
Relevant parameters
Class No.
Attribute
Title
Range Unit
Function
5
04
(Note 1)
C
Over-travel inhibit
input setup
0 to 2
-
Set up the operation of the run-inhibition (POT, NOT) inputs.
Normally it should be set to 1.
0: Deceleration stop on servo (MINAS A6) side (sequence at
time of run-inhibition input)
POT -> positive direction drive inhibit,
NOT -> negative direction drive inhibit.
When POT is input during positive direction driving, stops
the drive according to Pr5.05 Sequence at over-travel inhibit.
The similar function NOT is applied in reverse direction.
1: CoE (CiA402) side deceleration stop (Note 1)
POT -> positive direction drive inhibit,
NOT -> negative direction drive inhibit.
When POT is input during positive direction driving or NOT is
input during negative direction driving,EtherCAT profile
slowdown defined in CoE(CiA402) works and stops it.
The constants at the time of a slowdown differ for every
control mode.
2: Deceleration stop on servo (MINAS A6) side (Sequence at
alarm)
POT or NOT input activates Err 38.0 Run-inhibition input
protection.
5
05
(Note 1)
C
Sequence at
over-travel inhibit
0 to 2
-
When Pr5.04 Over-travel inhibition = 0, specify the status
during deceleration and stop after application of the over-travel
inhibition (POT, NOT).
5
11
B
Torque setup for
emergency stop
0 to 500 %
Set up the torque limit at emergency stop.
When setup value is 0, the torque limit for normal operation is
applied.
(Note 1) With POT of Axis A allocated to SI6 or NOT of Axis A allocated to SI7, or with POT of Axis B allocated to SI2 or NOT of AxisB
allocated to SI3, and Pr 5.04 "Over-travel inhibit input setup" is set to other than 1 (CoE side deceleration stop), Err38.2
"Over-travel inhibit input protection 3" occurs.
Summary of Contents for MINAS A6 Series
Page 10: ...Table of contents x Blank page...
Page 11: ...1 Introduction...
Page 26: ...Introduction 1 16 Blank page...
Page 27: ...2 Interface Specifications...
Page 46: ...Interface Specifications 2 20 Blank page...
Page 47: ...3 Front Panel Specifications...
Page 57: ...4 Basic Functions...
Page 85: ...5 Auto Tuning Functions...
Page 151: ...6 Application Functions...
Page 185: ...7 Protective Functions...
Page 224: ...Protective Functions 7 40 Blank page...
Page 225: ...8 Advanced Safety Functions...
Page 230: ...Advanced Safety Functions 8 6 When test pulse is used Duplex safety input Safety input...
Page 245: ...9 List of Parameters...
Page 281: ...10 Timing Chart...
Page 290: ...Timing Chart 10 10 Blank page...
Page 291: ...11 Power Supply Module...







































































