





























Interface Specifications
2-6
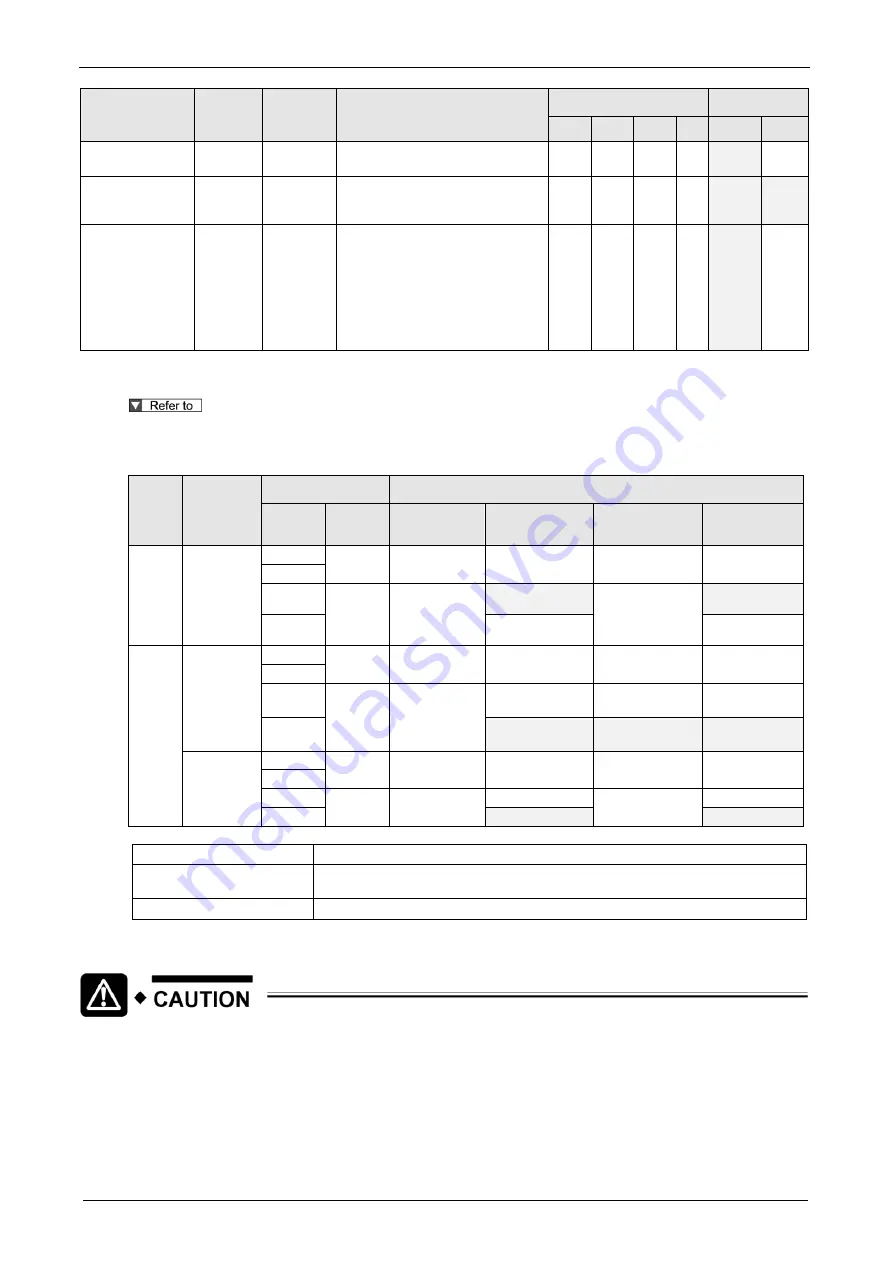
Signal name
Symbol
Connector
pin No.
(Note 2)
Contents
Related control mode
EtherCAT
communications
Position Velocity Torque
Full-
close
command
monitor
(Note 3)
Servo on status
output
SRV-ST
*
Turns on the output transistor during
servo on.
✔
✔
✔
✔
-
✔
Position
comparison output
CMP-OUT *
The output transistor is turned ON or
OFF when the actual position passes
the position set by the parameter.
✔
✔
✔
✔
-
-
Deterioration
diagnosis velocity
output
V-DIAG
*
Output transistor turned ON when
motor speed is within the range of
Pr4.35 “Speed coincidence range” of
Pr5.75 “Deterioration diagnosis
velocity setting”.
There is a hysteresis of 10r/min in
the coincidence judgment of
deterioration diagnosis velocity.
✔
✔
✔
✔
-
✔
(Note 1)
For the signal with “-” sign in the “Related control mode” column, the output transistor is always turned off in that control mode.
(Note 2)
Output pin assignment can be changed. The pins in “Connector pin No.” column in the table denote factory default settings. The
signal with a pin that is marked with “*” is not assigned by default.
For more informat
ion, refer to “ 2.4.2 Output signal allocation”.
(Note 3) It is possible to monitor the condition of the signals where
“
✔
” is attached to the EtherCAT communication monitor on the table
with 2322h/2722h (Logical output signal) or 60FDh/68FDh (Digital inputs).
(Note 4) The state of output transistor changes as follows in each EtherCAT communication state:
Symbol
Setting value
of Pr7.24
Setting value of
60FEh/68FEh
State of output transistor (SO1/SO2)
01h
(Physical
outputs)
02h
(Bit mask)
Reset
Communication
established
(Note 5)
Communication
intercepted
(Note 5)
Communication
re-established
(Note 5)
set brake -
0
0
set brake = 1
(brake on)
set brake = 1
(brake on)
set brake = 1
(brake on)
set brake = 1
(brake on)
1
0
1
set brake = 1
(brake on)
set brake = 0
set brake = 1
(brake on)
set brake = 0
1
set brake = 1
(brake on)
set brake = 1
(brake on)
EX-OUT1
bit0 = 0
(hold)
0
0
EX-OUT1 = 0
EX-OUT1 = 0
EX-OUT1 = 0
EX-OUT1 = 0
1
0
1
EX-OUT1 = 0
EX-OUT1 = 0
EX-OUT1 = 0
(hold)
EX-OUT1 = 0
1
EX-OUT1 = 1
EX-OUT1 = 1
(hold)
EX-OUT1 = 1
bit0 = 1
(initialization)
0
0
EX-OUT1 = 0
EX-OUT1 = 0
EX-OUT1 = 0
EX-OUT1 = 0
1
0
1
EX-OUT1 = 0
EX-OUT1 = 0
EX-OUT1 = 0
EX-OUT1 = 0
1
EX-OUT1 = 1
EX-OUT1 = 1
(Note 5)
“Communication established”, “Communication intercepted”, and “Communication re-established” refer to the following cases.
Communication established
ESM state is PreOP or higher
Communication intercepted
PDO communication is disabled(ESM state transitioned to other states than OP), or SDO
communication is disabled(ESM state transitioned to Init)
Communication re-established
60FEh-01h or 60FEh-02h has been written successfully
(Note 6) Pr4.59 (Mechanical brake signal setting) sets the mechanical brake signal output from the mechanical brake output (BRK +/-)
and does not affect the set brake output from SO1 / SO2.
Safety precautions:
When executing set brake signal control using 60FEh/68FDh (Digital outputs), be sure to
use it in PDO and enable the PDO watch dog.
In SDO, the communication shutoff cannot be judged, the brake may be kept to be released
and it is unsafe.
Please ensure safety on the equipment side.
Summary of Contents for MINAS A6 Series
Page 10: ...Table of contents x Blank page...
Page 11: ...1 Introduction...
Page 26: ...Introduction 1 16 Blank page...
Page 27: ...2 Interface Specifications...
Page 46: ...Interface Specifications 2 20 Blank page...
Page 47: ...3 Front Panel Specifications...
Page 57: ...4 Basic Functions...
Page 85: ...5 Auto Tuning Functions...
Page 151: ...6 Application Functions...
Page 185: ...7 Protective Functions...
Page 224: ...Protective Functions 7 40 Blank page...
Page 225: ...8 Advanced Safety Functions...
Page 230: ...Advanced Safety Functions 8 6 When test pulse is used Duplex safety input Safety input...
Page 245: ...9 List of Parameters...
Page 281: ...10 Timing Chart...
Page 290: ...Timing Chart 10 10 Blank page...
Page 291: ...11 Power Supply Module...







































































