





























5.2Manual adjusting function
5-31
5.2.5 Gain switching function
By selecting appropriate gain based on internal data or external signal, the following effects can be
obtained.
Decrease the gain at the time of stoppage (servo lock) to reduce vibration.
Increase the gain at the time of stoppage (setting) to shorten the settling time.
Increase the gain during operation to improve command compliance.
Based on condition of the equipment, change the gain with external signal.
Relevant parameters
Set the gain switching function using the following parameters.
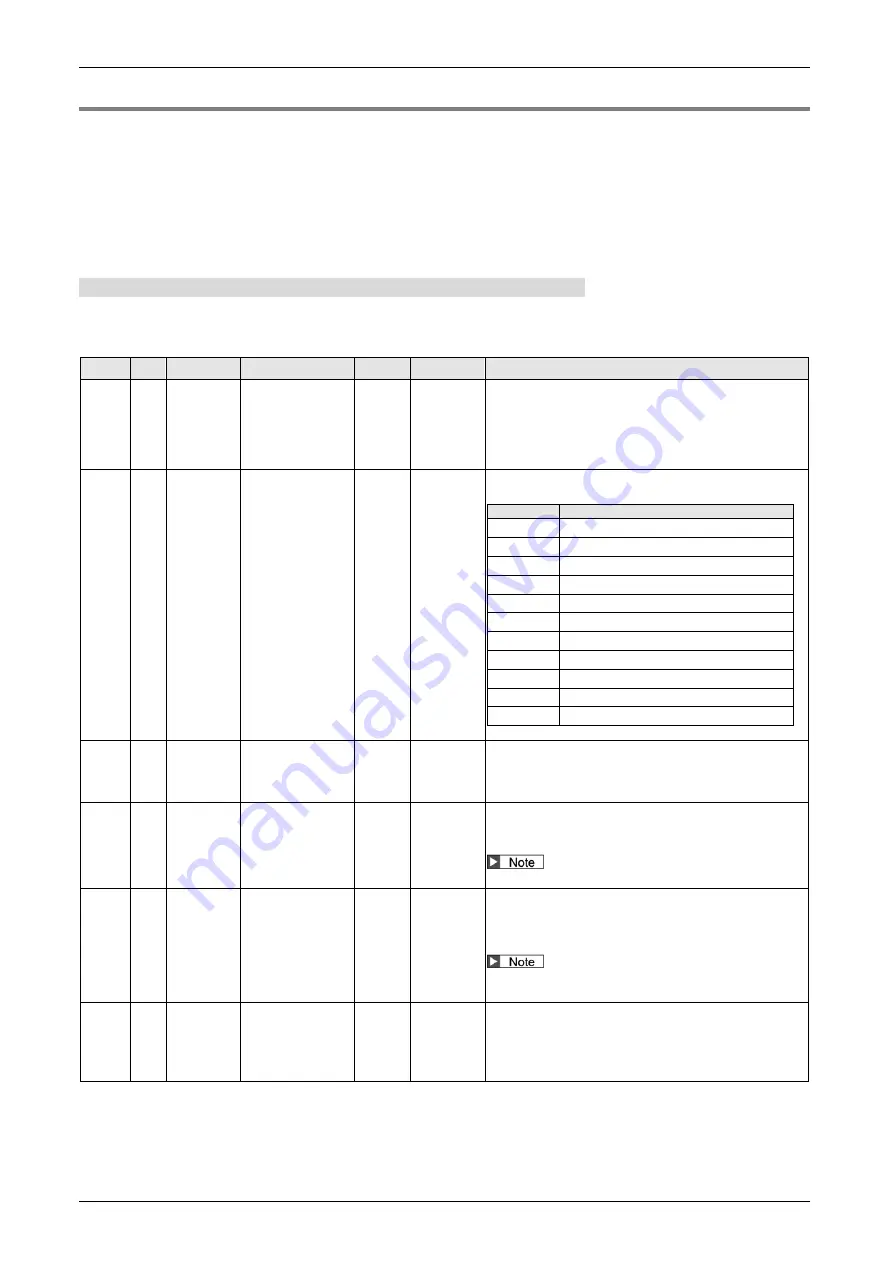
Relevant parameters
Class No. Attribute
Title
Range Unit
Function
1
14
B
2nd gain setup
0 to 1
-
Arrange this parameter when performing optimum
adjustment by using the gain switching function.
0: It is fixed to the 1st gain.
1: Enable gain switching of 1st gain (Pr 1.00 to Pr 1.04)
and 2nd gain (Pr 1.05 to Pr 1.09).
1
15
B
Mode of position
control switching
0 to 10
-
Set up the triggering condition of gain switching for position
control.
Setup value Switching condition
0
Fixed to 1st gain
1
Fixed to 2nd gain
2
For manufacturer’s use
3
Torque command
4
Invalid (Fixed to 1st gain)
5
Velocity command
6
Position deviation
7
Position command exists
8
Not in positioning complete
9
Actual speed
10
Position command Actual speed
1
16
B
Delay time of
position control
switching
0 to
10000
0.1 ms
For position controlling: When shifting from the 2nd gain to
the 1st gain with Pr 1.15 Position control gain switching
mode set at 3, 5, 6, 7, 8, 9 or 10, set up the delay time from
trigger detection to the switching operation.
1
17
B
Level of position
control switching
0 to
20000
Mode
dependent
For position controlling: Set up triggering level when Pr 1.15
“Position control gain switching mode” is set at 3, 5, 6, 9 or
10. Unit of setting varies with switching mode.
Set the level equal to or higher than the hysteresis.
1
18
B
Hysteresis at
position control
switching
0 to
20000
Mode
dependent
For position controlling: Set up triggering hysteresis when
Pr 1.15 “Position control gain switching mode” is set at 3, 5,
6, 9 or 10.
Unit of setting varies with switching mode.
When level < hysteresis, the hysteresis is internally
adjusted so that it is equal to level.
1
19
B
Position gain
switching time
0 to
10000
0.1 ms
For position controlling: If the difference between Pr 1.00
"1st gain of position loop" and Pr 1.05 "2nd gain of poison
loop" is large, the increasing rate of position loop gain can
be limited by this parameter.
The position loop gain will increase over the time set.
(To be continued)
Summary of Contents for MINAS A6 Series
Page 10: ...Table of contents x Blank page...
Page 11: ...1 Introduction...
Page 26: ...Introduction 1 16 Blank page...
Page 27: ...2 Interface Specifications...
Page 46: ...Interface Specifications 2 20 Blank page...
Page 47: ...3 Front Panel Specifications...
Page 57: ...4 Basic Functions...
Page 85: ...5 Auto Tuning Functions...
Page 151: ...6 Application Functions...
Page 185: ...7 Protective Functions...
Page 224: ...Protective Functions 7 40 Blank page...
Page 225: ...8 Advanced Safety Functions...
Page 230: ...Advanced Safety Functions 8 6 When test pulse is used Duplex safety input Safety input...
Page 245: ...9 List of Parameters...
Page 281: ...10 Timing Chart...
Page 290: ...Timing Chart 10 10 Blank page...
Page 291: ...11 Power Supply Module...







































































