





























6.3Deceleration stop sequence
6-3
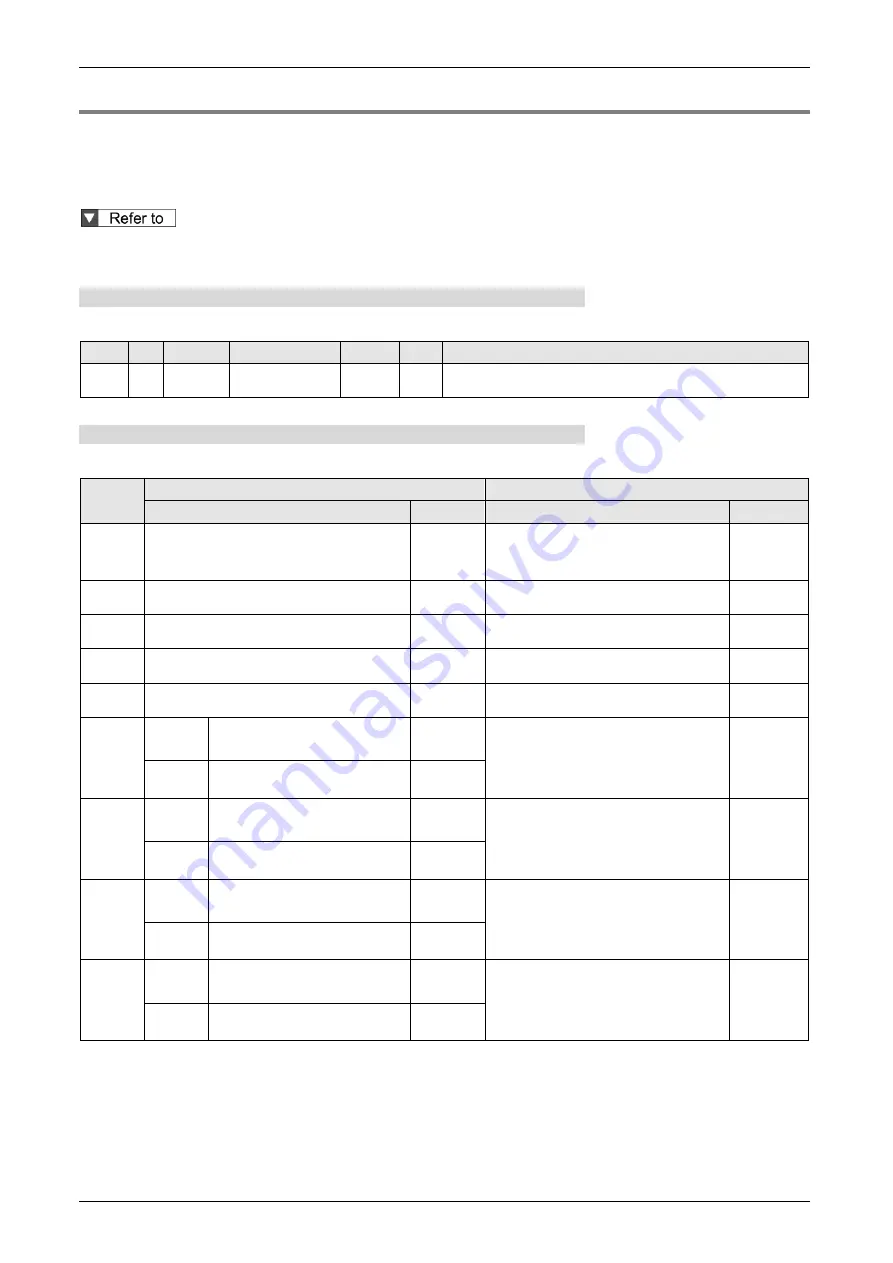
6.3.4 Sequence at alarm
Set the operation sequence at the alarm with the exception of the communication related alarm (Err80.*,
Err81.*, Err85.*, Err88.*).
Communication related alarms (Err80.*, Err81.*, Err85.*, Err88.*) information, set by 605Eh/685Eh (Fault
reaction option code).
Please refer to "TECHNICAL REFERENCE EtherCAT Communication Specification (SX-DSV03456)" for
details.
Relevant parameters
Relevant parameters
Class No. Attribute Title
Range
Unit
Function
5
10
B
Sequence at alarm 0 to 7
-
Specify the status during deceleration and after stop, after
occurrence of alarm.
Contents
Details of Pr 5.10 (Sequence at alarm)
Pr 5.10
During deceleration (Note 4)
After stalling (Approx. 30 r/min or below)
Stopping method
Deviation Operation after stopping
Deviation
Common
Forcibly controls the position. (Note 1)
Forcibly stops position command generation.
(Note 1)
-
Forcibly controls the position. (Note 1)
Forcibly stops position command
generation. (Note 1)
-
0
Dynamic brake (DB) (Note 6)
Clear
(Note 2)
Dynamic brake (DB) (Note 6)
Clear
(Note 2)
1
Free run (DB OFF)
Clear
(Note 2)
Dynamic brake (DB) (Note 6)
Clear
(Note 2)
2
Dynamic brake (DB) (Note 6)
Clear
(Note 2)
Free run (DB OFF)
Clear
(Note 2)
3
Free run (DB OFF)
Clear
(Note 2)
Free run (DB OFF)
Clear
(Note 2)
4
Action A
(Note3)
Emergency stop (Note 3) (Note 5)
Torque limit =Pr 5.11
Clear
(Note 2)
Dynamic brake (DB) (Note 6)
Clear
(Note 2)
Action B
(Note3)
Dynamic brake (DB) (Note 6)
Clear
(Note 2)
5
Action A
(Note3)
Emergency stop (Note 3) (Note 5)
Torque limit =Pr 5.11
Clear
(Note 2)
Dynamic brake (DB) (Note 6)
Clear
(Note 2)
Action B
(Note3)
Free run (DB OFF)
Clear
(Note 2)
6
Action A
(Note3)
Emergency stop (Note 3) (Note 5)
Torque limit =Pr 5.11
Clear
(Note 2)
Free run (DB OFF)
Clear
(Note 2)
Action B
(Note3)
Dynamic brake (DB) (Note 6)
Clear
(Note 2)
7
Action A
(Note3)
Emergency stop (Note 3) (Note 5)
Torque limit =Pr 5.11
Clear
(Note 2)
Free run (DB OFF)
Clear
(Note 2)
Action B
(Note3)
Free run (DB OFF)
Clear
(Note 2)
(Note 1) During deceleration sequence or at the stop (during alarm or servo OFF), the system must control the position and stop the
generation of internal position command.
(Note 2) During deviation clearing process, the system causes the internal command position to follow up the feedback position. When
executing the interpolation feed system command after servo ON, first re-set the command coordinate of the host controller. The
motor may operate sharply..
(To be continued)
Summary of Contents for MINAS A6 Series
Page 10: ...Table of contents x Blank page...
Page 11: ...1 Introduction...
Page 26: ...Introduction 1 16 Blank page...
Page 27: ...2 Interface Specifications...
Page 46: ...Interface Specifications 2 20 Blank page...
Page 47: ...3 Front Panel Specifications...
Page 57: ...4 Basic Functions...
Page 85: ...5 Auto Tuning Functions...
Page 151: ...6 Application Functions...
Page 185: ...7 Protective Functions...
Page 224: ...Protective Functions 7 40 Blank page...
Page 225: ...8 Advanced Safety Functions...
Page 230: ...Advanced Safety Functions 8 6 When test pulse is used Duplex safety input Safety input...
Page 245: ...9 List of Parameters...
Page 281: ...10 Timing Chart...
Page 290: ...Timing Chart 10 10 Blank page...
Page 291: ...11 Power Supply Module...







































































