





























5.1Automatic adjusting function
5-7
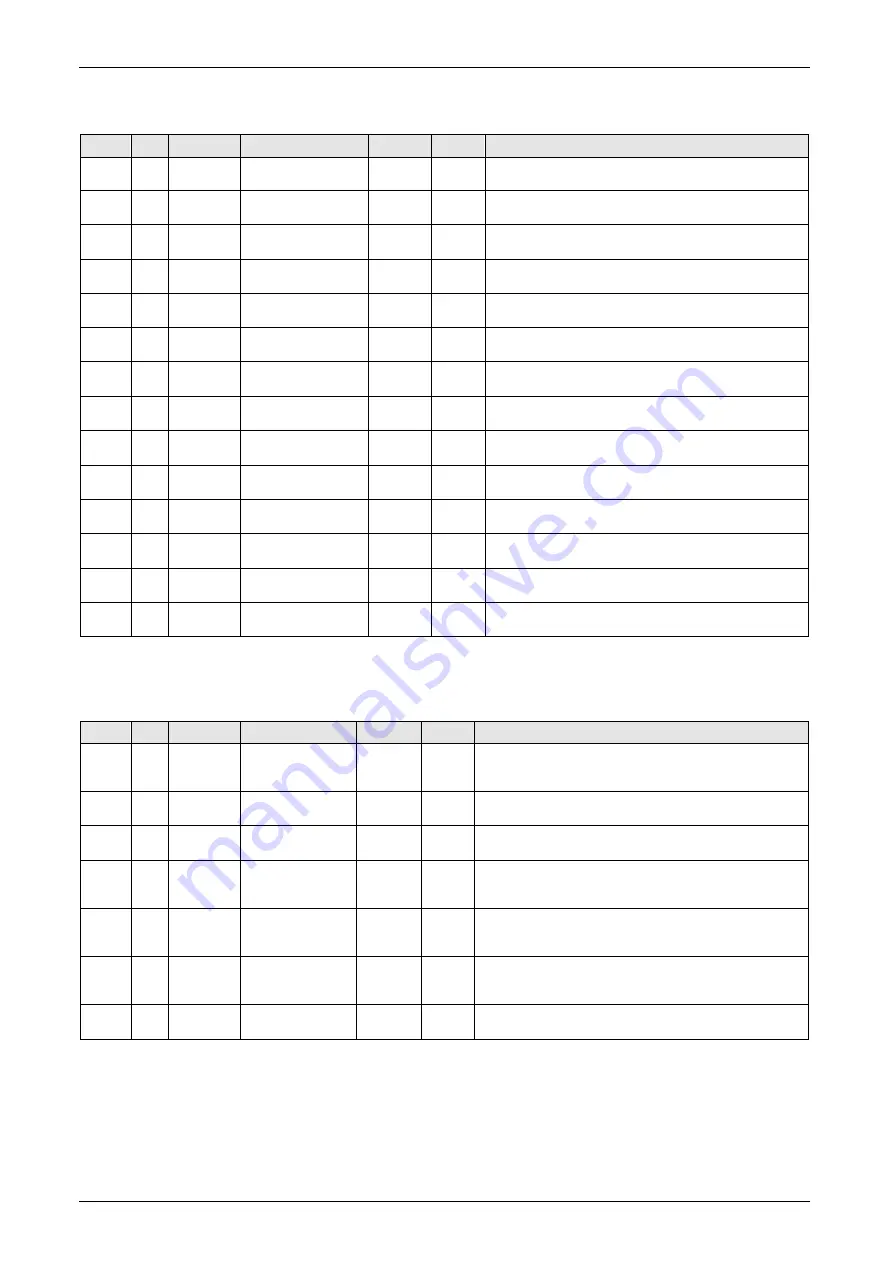
The Real-time auto tuning function sets the following parameters as the gain is switched.
Relevant parameters
Class No. Attribute Title
Range
Unit
Function
1
14
B
2nd gain setup
0 to 1
-
Sets to 1 if the current setting is not maintained
1
15
B
Mode of position
control switching
0 to 10
-
Sets to 10 to enable the gain switching.
Sets to 0 to disable the gain switching.
1
16
B
Delay time of position
control switching
0 to
10000
0.1 ms
Sets to 50 if the current setting is not maintained.
1
17
B
Level of position
control switching
0 to
20000
-
Sets to 50 if the current setting is not maintained.
1
18
B
Hysteresis at position
control switching
0 to
20000
-
Sets to 33 if the current setting is not maintained.
1
19
B
Position gain
switching time
0 to
10000
0.1 ms
Sets to 33 if the current setting is not maintained.
1
20
B
Mode of velocity
control switching
0 to 5
-
Sets to 0 if the current setting is not maintained.
1
21
B
Delay time of velocity
control switching
0 to
10000
0.1 ms
Sets to 0 if the current setting is not maintained.
1
22
B
Level of velocity
control switching
0 to
20000
-
Sets to 0 if the current setting is not maintained.
1
23
B
Hysteresis at velocity
control switching
0 to
20000
-
Sets to 0 if the current setting is not maintained.
1
24
B
Mode of torque control
switching
0 to 3
-
Sets to 0 if the current setting is not maintained.
1
25
B
Delay time of torque
control switching
0 to
10000
0.1 ms
Sets to 0 if the current setting is not maintained.
1
26
B
Level of torque control
switching
0 to
20000
-
Sets to 0 if the current setting is not maintained.
1
27
B
Hysteresis at torque
control switching
0 to
20000
-
Sets to 0 if the current setting is not maintained.
The following settings are always set to invalid when Pr 0.02 "Real-time auto tuning setup" is not 0.
However, the parameter settings are not changed.
Relevant parameters
Class No. Attribute Title
Range
Unit
Function
6
10
B
Function expansion
setup
0 to 1023 -
Instantaneous velocity observer function enable bit (bit 0),
disturbance observer function enable bit (bit 1) are internally
disabled.
6
23
B
Load change
compensation gain
-100 to
100
%
Parameter setup can be changed, but disturbance observer
is disabled.
6
24
B
Load change
compensation filter
10 to
2500
0.01 ms Parameter setup can be changed, but disturbance observer
is disabled.
6
73
B
Load estimation
filter
0 to 2500 0.01 ms When set to Pr 6.10 bit14=1 in case of stiffness setting is
enabled, sets to 0.13 ms.
When set to Pr 6.10 bit14=0, set to 0 ms.
6
74
B
Torque
compensation
frequency 1
0 to 5000 0.1 Hz
Regardless value of the Pr 6.10 bit 14, sets to 0.
6
75
B
Torque
compensation
frequency 2
0 to 5000 0.1 Hz
Regardless value of the Pr 6.10 bit 14, sets to 0.
6
76
B
Load estimation
count
0 to 8
-
When set to Pr 6.10 bit 14=1 in case of stiffness setting is
enabled, sets to 4.
Summary of Contents for MINAS A6 Series
Page 10: ...Table of contents x Blank page...
Page 11: ...1 Introduction...
Page 26: ...Introduction 1 16 Blank page...
Page 27: ...2 Interface Specifications...
Page 46: ...Interface Specifications 2 20 Blank page...
Page 47: ...3 Front Panel Specifications...
Page 57: ...4 Basic Functions...
Page 85: ...5 Auto Tuning Functions...
Page 151: ...6 Application Functions...
Page 185: ...7 Protective Functions...
Page 224: ...Protective Functions 7 40 Blank page...
Page 225: ...8 Advanced Safety Functions...
Page 230: ...Advanced Safety Functions 8 6 When test pulse is used Duplex safety input Safety input...
Page 245: ...9 List of Parameters...
Page 281: ...10 Timing Chart...
Page 290: ...Timing Chart 10 10 Blank page...
Page 291: ...11 Power Supply Module...







































































