





























Auto Tuning Functions
5-58
5.2.16 Two-degree-of-freedom control mode (with position control)
The two-degree-of-freedom control mode is an expanded function of the position control switching
mode. Responsiveness is improved by making it possible to set the positional command response and
servo stiffness independently.
Either of the standard type or synchronization type of the two-degree-of-freedom control can be used.
Applicable range
This function cannot be applied unless the following conditions are satisfied.
Operating conditions for the two-degree-of-freedom control mode:
Control Mode
Position control mode (semi-close control)
Others
The servo is ON.
Elements other than control parameters such as torque limit are set properly, and there is no obstacle to normal motor
operation.
Relevant parameters
First, set Pr6.47 "Function expansion setup 2" to bit0=1 and write the setting to EEPROM, and then
reset the control power to enable two-degree-of-freedom control.
After this, make adjustments of the Real-time auto tuning function.
Refer to Section "5.1.35.1.3Real-time auto tuning (Two-degree-of-freedom control mode standard type)
" or "5.1.4 Real-time auto tuning (Two-degree-of-freedom control mode synchronization type)"
Only when further improvement is required, manually fine-tune the following parameters while
confirming the response.
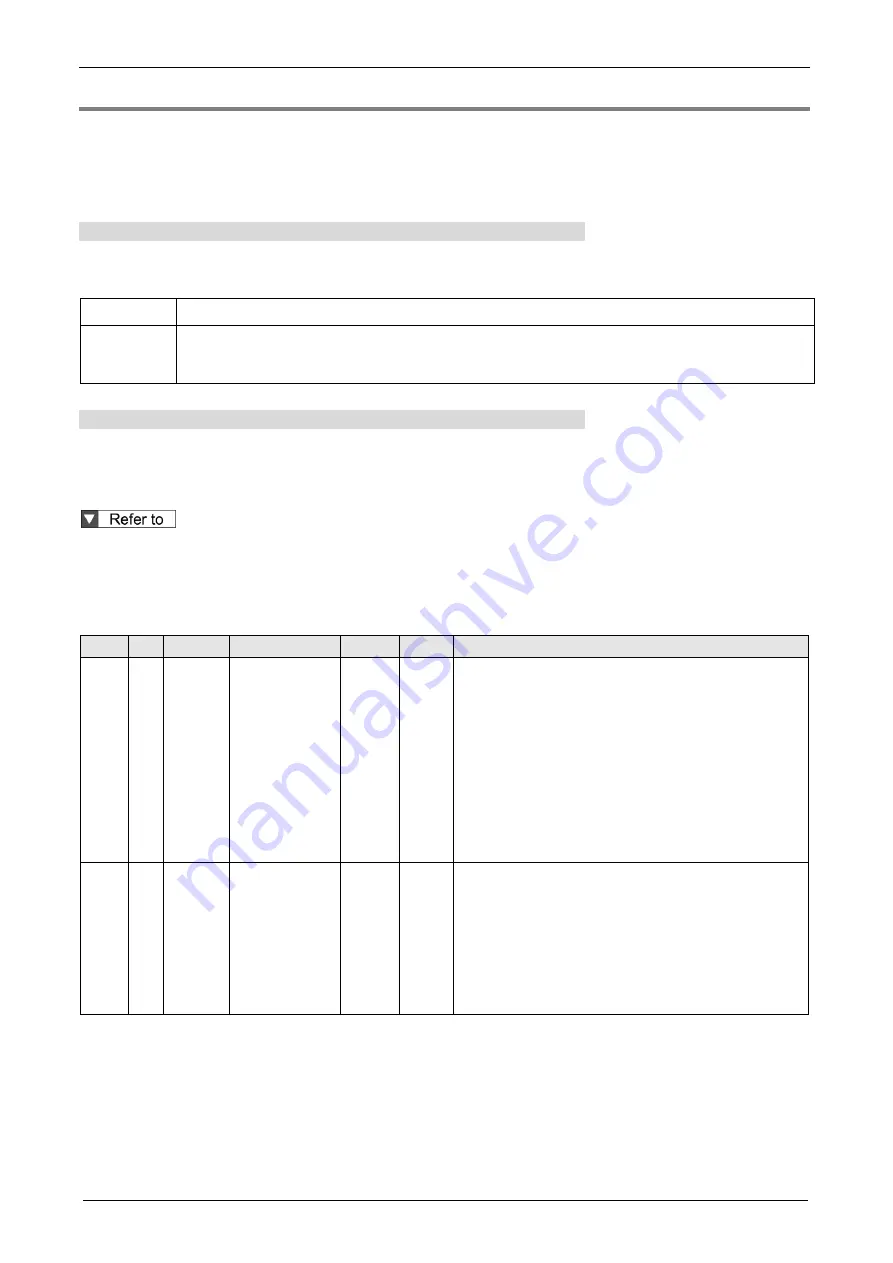
Relevant parameters
Class No. Attribute Title
Range
Unit
Function
6
47
R
Function
expansion setup 2
-32768 to
32767
-
Set respective functions in unit of bit.
bit0: two-degree-of-freedom control mode
0: Invalid
1: Valid
bit3: Selection of real-time auto-tuning of two-degree-of-freedom
control
0: Standard type
1: Synchronization type
* The least significant bit is bit0.
* bit3 (Selection of real-time auto-tuning of
two-degree-of-freedom control) can be used only when bit0 is
set to 1: Valid.
2
22
B
Command
smoothing filter
0 to
10000
0.1 ms
Time constant for the command filter is set in
two-degree-of-freedom control.
The maximum value is limited to 2000 (=200.0 ms).
*The parameter value itself is not limited, but the value applied
in the driver is limited.
Command response can be quickened by decreasing this
parameter and slowed by increasing it.
The attenuation term is set by Pr6.49 “Adjust/Torque command
attenuation term”.
(To be continued)
Summary of Contents for MINAS A6 Series
Page 10: ...Table of contents x Blank page...
Page 11: ...1 Introduction...
Page 26: ...Introduction 1 16 Blank page...
Page 27: ...2 Interface Specifications...
Page 46: ...Interface Specifications 2 20 Blank page...
Page 47: ...3 Front Panel Specifications...
Page 57: ...4 Basic Functions...
Page 85: ...5 Auto Tuning Functions...
Page 151: ...6 Application Functions...
Page 185: ...7 Protective Functions...
Page 224: ...Protective Functions 7 40 Blank page...
Page 225: ...8 Advanced Safety Functions...
Page 230: ...Advanced Safety Functions 8 6 When test pulse is used Duplex safety input Safety input...
Page 245: ...9 List of Parameters...
Page 281: ...10 Timing Chart...
Page 290: ...Timing Chart 10 10 Blank page...
Page 291: ...11 Power Supply Module...







































































