





























Basic Functions
4-10
4.2.4 Positioning complete output (INP/INP2) function
The completion of positioning can be verified by the positioning complete output (INP) or the positioning
complete output 2 (INP2).
When the absolute value of the positional deviation counter at the position control is equal to or below
the positioning complete range by the parameter, the output is ON. Presence and absence of positional
command can be specified as one of judgment conditions.
The calculation methods (standard) of a position deviation differ as follows according to the setting for
the command position deviation output switching (bit 14) of Pr7.23 "Communication function Extended
setup 2".
Pr7.23 bit14=0: Deviation with respect to command input after positional command filter
Pr7.23 bit14=1: Deviation with respect to command input before positional command filter
However, it becomes available when Pr5.20(Position setup unit select) is 0.
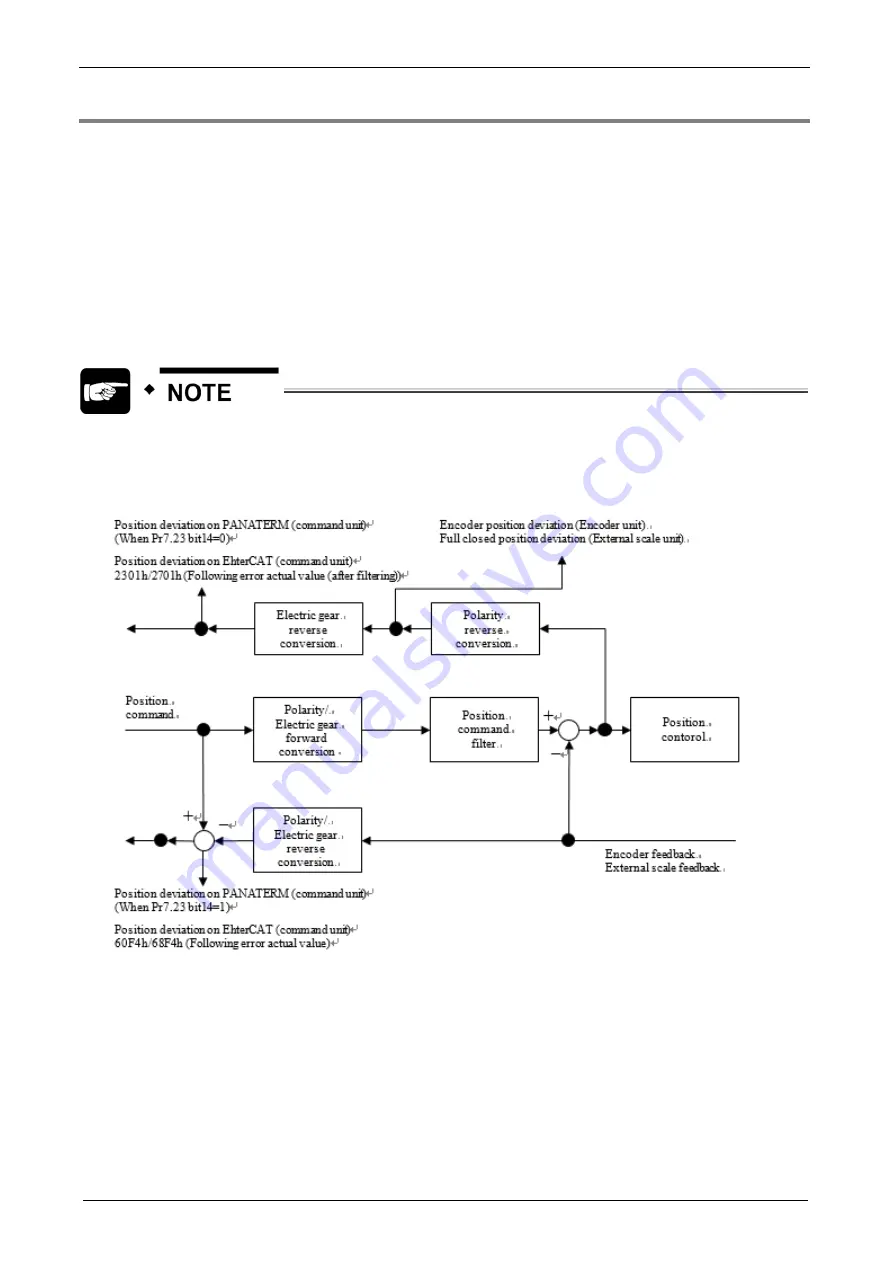
The “positional deviation” written in this section is that of the motor control process part
(on PANATERM for Multi), not 60F4h (Following error actual value) on the EtherCAT
communication.
The details of how to calculate the position deviation are shown in the figure below.
Summary of Contents for MINAS A6 Series
Page 10: ...Table of contents x Blank page...
Page 11: ...1 Introduction...
Page 26: ...Introduction 1 16 Blank page...
Page 27: ...2 Interface Specifications...
Page 46: ...Interface Specifications 2 20 Blank page...
Page 47: ...3 Front Panel Specifications...
Page 57: ...4 Basic Functions...
Page 85: ...5 Auto Tuning Functions...
Page 151: ...6 Application Functions...
Page 185: ...7 Protective Functions...
Page 224: ...Protective Functions 7 40 Blank page...
Page 225: ...8 Advanced Safety Functions...
Page 230: ...Advanced Safety Functions 8 6 When test pulse is used Duplex safety input Safety input...
Page 245: ...9 List of Parameters...
Page 281: ...10 Timing Chart...
Page 290: ...Timing Chart 10 10 Blank page...
Page 291: ...11 Power Supply Module...







































































