





























6
6.3
Axis couplings (from SW 3.3)
6-454
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
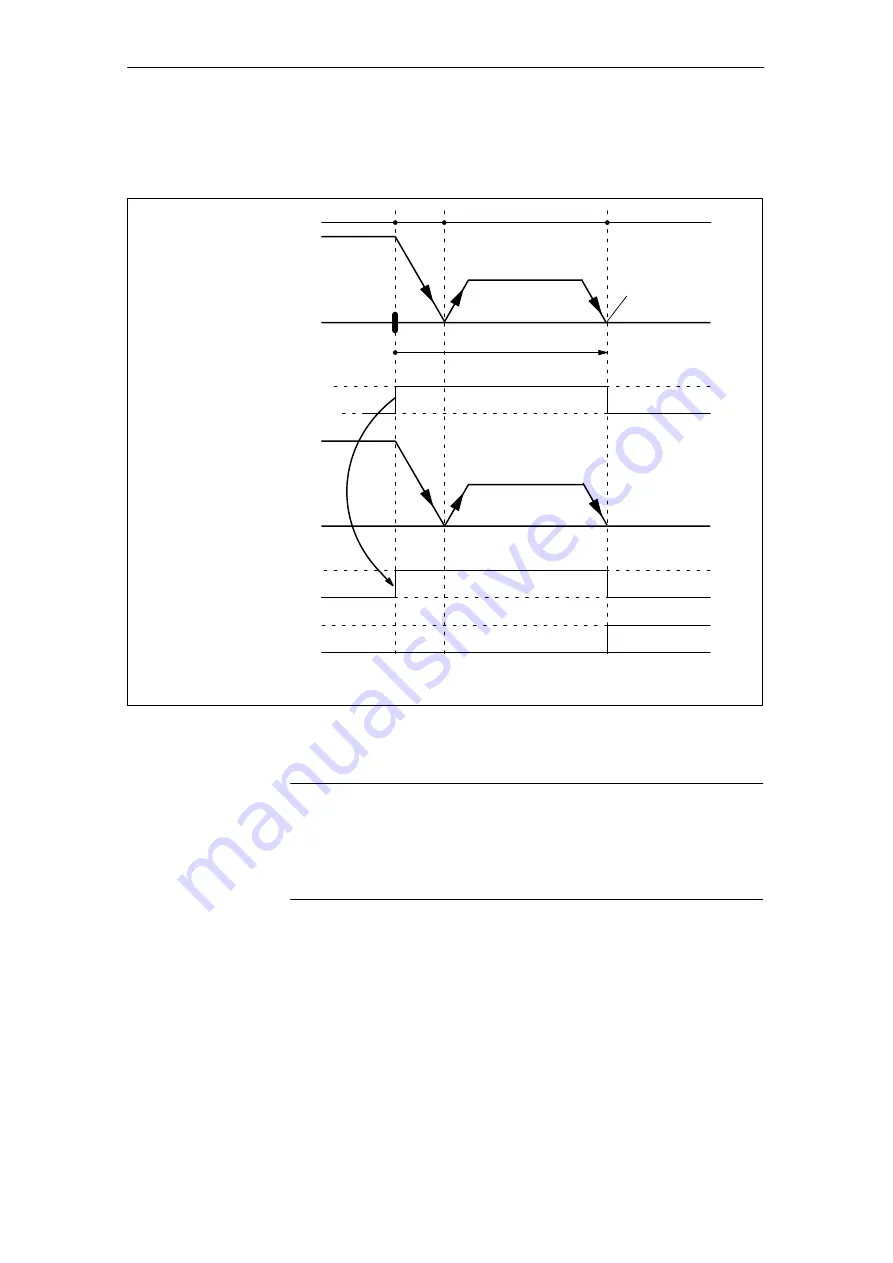
Master drive with incremental encoder and slave drive with absolute
value encoder.
Traversing profile
Slave drive
(encoder: absolute)
(permanent coupling)
Phase 1
2
3
4
Zero mark
Reference point
(P0160)
Output signal
”in synchronism”
Input signal
”request passive referencing”
P0162
Traversing profile
Master drive
(encoder: incremental)
Output signal
”request passive referencing”
P0160
Reference point coordinates
P0162
Reference point offset
Fig. 6-39 Sequence when passively referencing (master drive with incremental encoder and slave drive
with absolute value encoder)
Note
For a rigid mechanical coupling between the master and slave axes, it
is not permissible that P0179 is set to 2 if the slave drive is equipped
with an absolute value encoder. Otherwise, the slave drive would
position (in absolute terms) to the position specified in P0160.
Master and slave drive with absolute value encoder.
For master and slave drive with absolute value encoder, passive
referencing is not practical, as the axes have been adjusted corre-
sponding to Chapter 6.2.7 (Adjustment for absolute measuring sys-
tems).
6 Description of the Functions
01.99
02.03







































































