





























6.8 Vibration suppression function
6-30
6
Servo Tunin
g
When responsiveness is low, change the value of "Model control gain 1 [KM1]" to the
value approximately 1.1 to 1.2 times the value.
Depending on the mechanical system, there may be two or more frequency vibrations
aside from anti-resonance and resonance frequencies that have already been set. In
this case, the vibration can be suppressed using FF vibration suppression controls
together. Set the vibration frequency to Group02 ID00 "FF vibration suppression
frequency A1 [SUPFRQA1]" by calculating the frequency from the vibration period.
In case you cannot increase the gain because of mechanical resonance, etc., and
response is insufficient, use Torque command notch filter and FF vibration suppression
frequency to suppress the resonance, and then try again.
✔
Auto-tuning function is able to use only "Auto-tuning [JRAT manual setting]".
✔
Full-closed control is able to use in Model-following vibration suppression control, also.
✔
Model following (vibration suppression) control cannot be used when in Velocity control type
or Torque control type.
■
Setting parameters
General parameters Group3 “Model following control settings”
✔
Do not change the setting value when the servo motor is running.
■
Model Control Gain 1 [KM1]
This is the proportional gain of the Model following controlling position controller and set
response for Model control system. Adjust by referring to
“
KM1
≒
KP1
”
, as a rough
indication.
■
Model control damping coefficient [MZETA]
This is parameter which changes velocity proportional gain of Model following control.
The parameter value will be
ζ
=0.866 by 0% and
ζ
=1.0 by 100%.
■
Overshoot Suppression Filter [OSSFIL]
This parameter is to set the cutoff frequency of the Overshoot suppression filter in Model
following vibration suppression control. When overshoot occurs on position deviation, lower
the set value.
■
Model Control Anti-resonance Frequency 1 [ANRFRQ1]
This is to set the Anti-resonance frequency of the machine using Model following vibration
suppression control.
When the value is set higher than Model Control Resonance Frequency, vibration
suppression control will be invalid.
■
Model Control Resonance Frequency 1 [RESFRQ1]
This is to set the Resonance frequency of the machine model using Model following vibration
suppression control.
Vibration suppression control will be invalid at 80.0Hz.
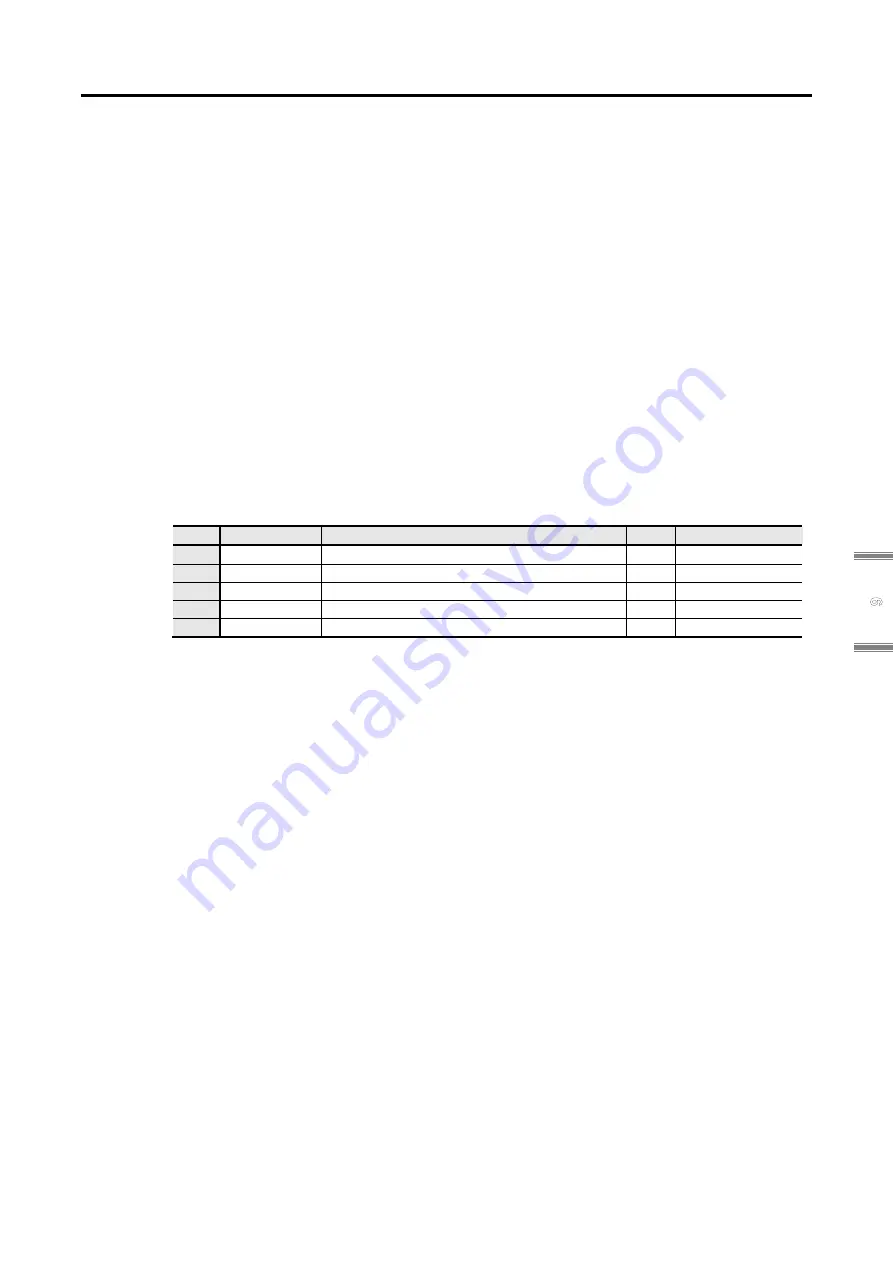
ID
Symbol
Name
Unit
Setting range
00
KM1
Model Control Gain 1
1/s
15 to 315
01
MZETA
Model control damping coefficient
%
0 to 100
05
OSSFIL
Overshoot Suppression Filter
Hz
1 to 4000
06
ANRFRQ1
Model Control Anti-resonance Frequency 1
Hz
10.0 to 80.0
07
RESFRQ1
Model Control Resonance Frequency 1
Hz
10.0 to 80.0
Summary of Contents for Sanmotion R 3E S
Page 1: ...M0010630G For Rotary Motor Instruction Manual Analog Pulse Input Type ...
Page 2: ......
Page 76: ...No Text on This Page ...
Page 88: ...No Text on This Page ...
Page 266: ...No Text on This Page ...
Page 332: ...No Text on This Page ...
Page 408: ...No Text on This Page ...
Page 444: ...No Text on This Page ...
Page 511: ...12 7 Optional parts dimensions 12 65 12 Appendix REGIST 1000W Wiring diagram ...
Page 512: ...No Text on This Page ...