





























5.8 Parameter functions
5-120
5
O
per
ation
-
GroupB
-
ID
Contents
02
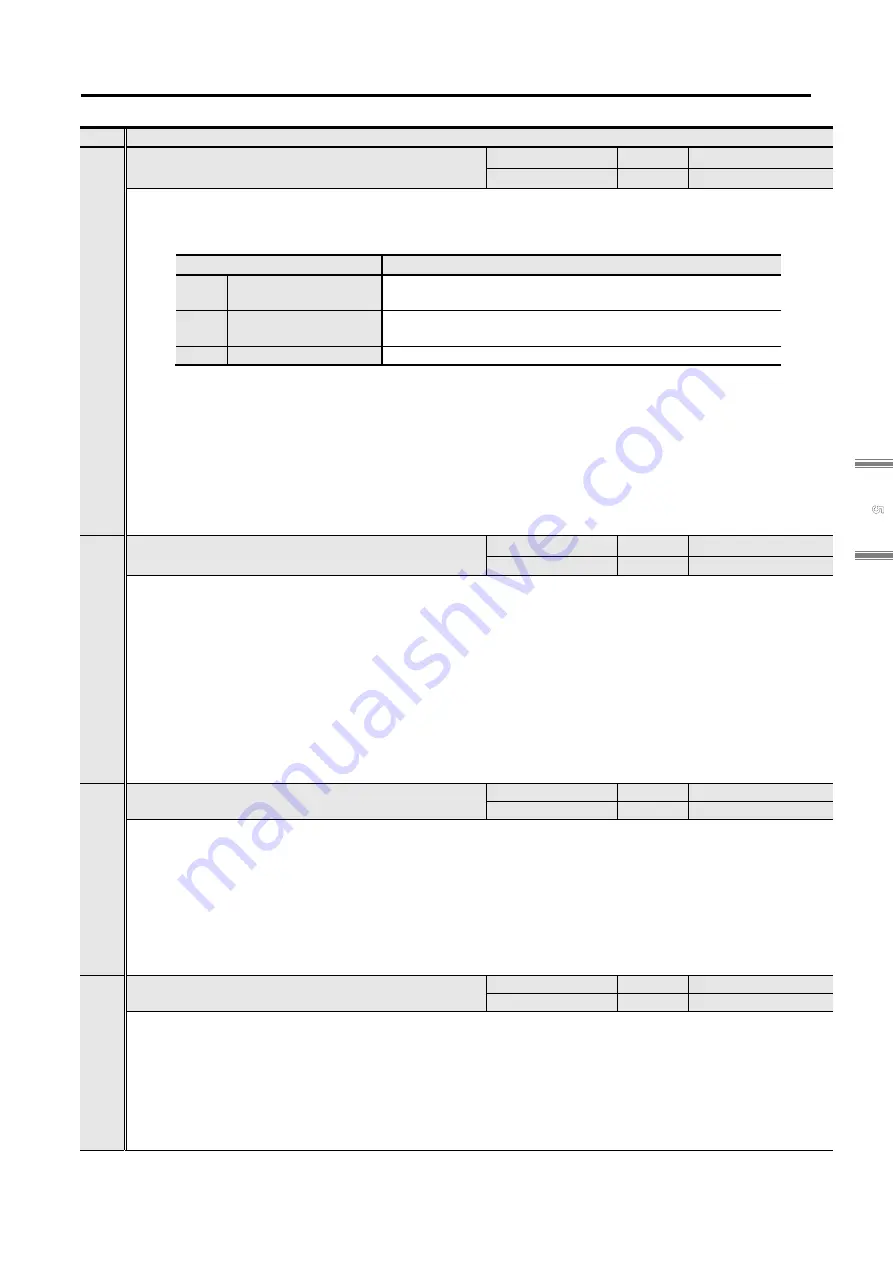
Emergency Stop Operation
[ACTEMR]
Setting range
Unit
Default value
00 to 02
-
00:SERVO-BRAKE
■
Sets operation at Emergency Stop
Selects operation at the time of emergency stop.
In case of vertical axis use, please use it with default setting (00: SERVO-BRAKE).
Under Torque control mode, dynamic brake stops servo motor regardless of the setting
value.
If the alarm that has DB in "Detection operations" at 8.2.2 Alarm list occurs, and no Safe
Torque Off function (servo amplifier model number option 2 is 0), stops servo motor by
dynamic brake regardless of this setting.
Sets the deceleration time constant of deceleration stop at GroupB ID16.
✔
Forced stop operation means “emergency stop function enabled”, “main circuit power
shutoff“, ”alarm activated” and “safe-torque-off operation”.
03
Delay Time of Engaging Holding Brake
(Holding Brake Holding Delay time) [BONDLY]
Setting range
Unit
Default value
0 to 1000
ms
300
■
Sets the holding-brake-activation delay time from when power distribution to holding brake stopped
till when holding torque generated.
While shifting from servo ON to servo OFF, during the setting time, Excitation command 0 is
given to servo motor. (Even when servo is turned OFF, power is supplied to the motor until
the setting time is over).
By this, until Holding brake functions, servo motor generates Holding torque.
Setting unit is 4ms. When the setting value is 0ms, after servo OFF, command is invalid
(command 0) for approximately 4ms.
At the setting, GroupB ID00 [DBOPR] Servo-OFF stop behavior, when servo brake is ON at
servo OFF, (04 SB_Free or 05 SB_DB), this is valid.
(This function is invalid in Dynamic brake operation and Free-run operation.)
04
Delay Time of Releasing Holding Brake
(Holding Brake Releasing Delay time) [BOFFDLY]
Setting range
Unit
Default value
0 to 1000
ms
300
■
Sets the holding-brake-release delay time from when power distribution to holding brake started till
when holding torque disappeared.
While shifting from servo OFF to servo ON, during the setting time, Excitation command 0 is
given to servo motor. (Even when servo is turned ON, command is not accepted until the
setting time is complete.)
Therefore, until Holding brake is released, servo motor does not operate.
Setting unit is 4ms. When the setting value is 0ms, after servo ON, command is invalid
(command 0) for approximately 4ms.
05
Brake Operation Beginning Time
[BONBGN]
Setting range
Unit
Default value
0 to 65535
ms
10000
■
Sets permissible time from servo OFF until servo motor stop.
While shifting servo ON to servo OFF, even after the selected time passed and the servo
motor does not stop. Servo motor is forced to stop with Holding brake and Dynamic brake.
When the servo motor stops this setting does not function.
When servo motor does not stop after servo OFF at gravity axis, set this parameter.
When forced to stop by holding brake, the Holding brake may possibly be broken.
Be cautious about device specifications and sequence when using this function.
Selection
Contents
00
SERVO-BRAKE
Stops servo motor by operating servo brake at
Emergency stop.
01
DYNAMIC-BRAKE
Stops servo motor by operating dynamic brake at
Emergency stop.
02
DEC-STOP
Stops servo motor after deceleration at Emergency stop.
Summary of Contents for Sanmotion R 3E S
Page 1: ...M0010630G For Rotary Motor Instruction Manual Analog Pulse Input Type ...
Page 2: ......
Page 76: ...No Text on This Page ...
Page 88: ...No Text on This Page ...
Page 266: ...No Text on This Page ...
Page 332: ...No Text on This Page ...
Page 408: ...No Text on This Page ...
Page 444: ...No Text on This Page ...
Page 511: ...12 7 Optional parts dimensions 12 65 12 Appendix REGIST 1000W Wiring diagram ...
Page 512: ...No Text on This Page ...