





























5. Operation
5-119
-
GroupB
-
ID
Contents
01
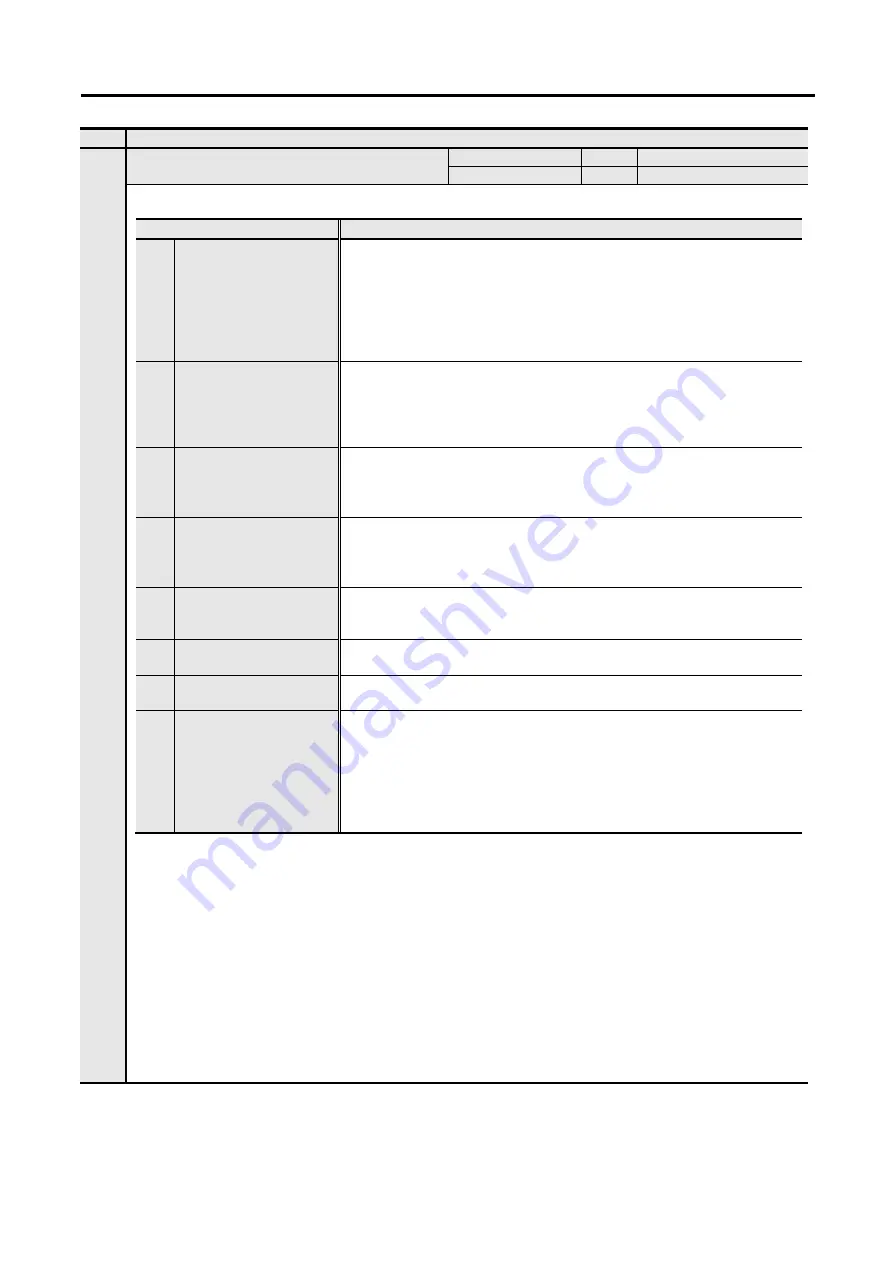
Over-Travel Action
[ACTOT]
Setting range
Unit
Default value
00 to 08
-
00:CMDINH_SB_SON
■
Selects operations at over-travel action.
Torque limit value differs depending on selection code, when stopping a servo motor by
servo-brake.
00: Peak torque
03, 08: Sequence torque limit
For the velocityt control mode, select from 00 to 05 or 08.
For the torque control mode, operates as follows:
For 00 to 02 or 08, keeps servo-on state with torque command limitation by
sequence torque limit.
For 03 or 04, shift to servo-off state and stop with dynamic brake. Also keeps
servo-off state after motor stop.
For 05, shift to servo-off state and becobe freerun operation. Also keeps
servo-off state after motor stop.
Selection
Contents
00 CMDINH_SB_SON
Command input is disabled, and motor is stopped by servo-braking
(with peak torque) when OT occurs. Servo is turned on after motor
stops.
(Command from either positive or negative direction in which OT
occurs, command disabled = velocity limit command = 0)
(Torque command for OT side is limited by the sequence torque
limit.)
01 CMDINH_DB_SON
Command input is disabled, and motor is stopped by
dynamic-braking when OT occurs. Servo is turned on after motor
stops.
(Command from either positive or negative direction in which OT
occurs, command disabled = velocity limit command = 0)
02 CMDINH_Free_SON
Command input is disabled, and motor is free-running when OT
occurs. Servo is turned on after motor stops.
(Command from either positive or negative direction in which OT
occurs, command disabled = velocity limit command = 0)
03 CMDINH_SB_SOFF
Command input is disabled, and motor is stopped by servo-braking
when OT occurs. Servo is turned off after motor stops.
(Torque command for both side is limited by the sequence torque
limit.)
04 CMDINH_DB_SOFF
Command input is disabled, and motor is stopped by
dynamic-braking when OT occurs. Servo is turned off after motor
stops.
05 CMDINH_Free_SOFF
Command input is disabled, and motor is free-running when OT
occurs. Servo is turned off after motor stops.
06 CMDACK_VCLM=0
Velocity limit command for the direction on which OT occured
becomes zero when OT occurs.
08
CMDINH_SB_SON2
Command input is disabled, and motor is stopped by servo-brake
operation (with sequence torque limit) when OT occurs.
Servo is turned on after motor stops.
(Command from either positive or negative direction in which OT
occurs, command disabled = velocity limit command = 0)
(Torque command for both side is limited by the sequence torque
limit.)
Summary of Contents for Sanmotion R 3E S
Page 1: ...M0010630G For Rotary Motor Instruction Manual Analog Pulse Input Type ...
Page 2: ......
Page 76: ...No Text on This Page ...
Page 88: ...No Text on This Page ...
Page 266: ...No Text on This Page ...
Page 332: ...No Text on This Page ...
Page 408: ...No Text on This Page ...
Page 444: ...No Text on This Page ...
Page 511: ...12 7 Optional parts dimensions 12 65 12 Appendix REGIST 1000W Wiring diagram ...
Page 512: ...No Text on This Page ...