





























AKD PDMM User Guide | 44.3 SM.MODE
General Information
Range
0 to 2
Default
Value
0
Data Type
Integer
See Also
SM.I1 (pg 431), SM.I2 (pg 431), SM.MOVE (pg 434), SM.T1 (pg 434) SM.T2 (pg
434), SM.V1 (pg 435), SM.V2 (pg 436), DRV.ACC (pg 262)DRV.DEC (pg 269)
Start Ver-
sion
M_01-01-00-000
Description
SM.MODE defines the mode of service motion for each loop. Two types of service motion are
available :
l
A constant motion in one direction (endless or for a certain amount of time).
l
An alternating motion.
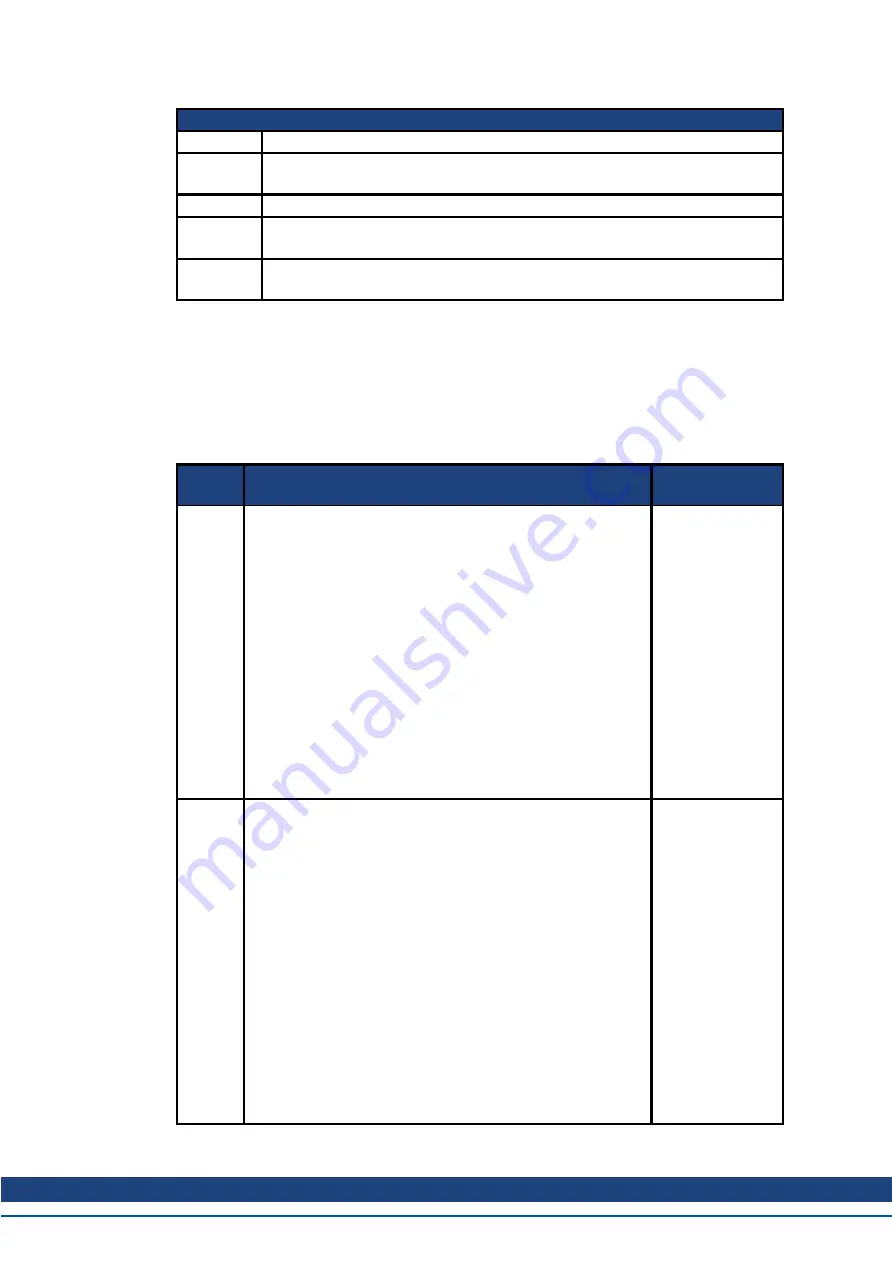
The possible modes for this parameter are described in the following table:
SM.MOD-
E
Description
Requirements
0
Constant motion in closed current loop mode of operation.
l
DRV.OPMODE 0:
The drive generates a constant current command value
(SM.I1) for a certain amount of time (if SM.T1>0) or end-
less (if SM.T1=0). The drive will not generate any ramps in
this mode of operation.
l
DRV.OPMODE 1 or 2:
The drive generates a constant velocity command value
(SM.V1) for a certain amount of time (if SM.T1>0) or end-
less (if SM.T1=0). The drive generates acceleration and
deceleration ramps according to the DRV.ACC and
DRV.DEC setting in this mode of operation.
The service motion can be stopped by using the DRV.STOP
command.
DRV.OPMODE =
0,1, or 2
DRV.CMDSOUR-
CE = 0
1
l
DRV.OPMODE 0:
The drive generates a current command value (SM.I1) for a
certain amount of time (SM.T1). Afterwards the drive gen-
erates a current command value (SM.I2) for another cer-
tain amount of time (SM.T2). This sequence is repeated as
long as a DRV.STOP command occurs. The drive will not
generate any ramps in this mode of operation.
l
DRV.OPMODE 1 or 2:
The drive generates a velocity command value (SM.V1) for
a certain amount of time (SM.T1). Afterwards the drive gen-
erates a velocity command value (SM.V2) for another cer-
tain amount of time (SM.T2). This sequence is repeated as
long as a DRV.STOP command occurs. The drive will gen-
erate an acceleration and deceleration ramps according to
the DRV.ACC and DRV.DEC setting in this mode of oper-
ation.
DRV.OPMODE =
0, 1, or 2
DRV.CMDSOUR-
CE = 0
Kollmorgen™ | December 2012
432
Summary of Contents for AKD PDMM series
Page 25: ...This page intentionally left blank 25 Kollmorgen December 2012...
Page 32: ...This page intentionally left blank 32 Kollmorgen December 2012...
Page 52: ...This page intentionally left blank 52 Kollmorgen December 2012...
Page 101: ...AKD PDMM User Guide 12 3 6 2 Biquad Calculations 101 Kollmorgen December 2012...
Page 133: ...This page intentionally left blank 133 Kollmorgen December 2012...
Page 158: ...AKD PDMM User Guide 17 Connection Diagrams Kollmorgen December 2012 158...
Page 470: ...AKD PDMM User Guide 48 27 VL THRESH 1 Velocity Loop 470 Kollmorgen December 2012...
Page 511: ...This page intentionally left blank 511 Kollmorgen December 2012...
Page 513: ...This page intentionally left blank 513 Kollmorgen December 2012...







































































