





























AKD PDMM User Guide | 7.6 Using Position Capture
7.6 Using Position Capture
7.6.1 Overview
Position capture allows you to precisely determine what the motor position (or drive clock time) was when
a specific event triggers. The AKD PDMM drive uses two independent captures, which operate similarly.
The descriptions provided in this user guide refer to Capture 0, but also apply to Capture 1.
Position capture is used in precision environments, where the motor may be moving at very high veloc-
ities, an IO is triggered, and you must know exactly where the motor was when the event occurred. Hom-
ing algorithms often use position capture.
Position capture will capture the motor position (or drive clock time) when the capture trigger is activated.
The position capture or drive lock time capture will happen in less than 3 microseconds of the input tran-
sition. This assumes the use of high speed input 1 or 2 with the filter turned off. The capture engine can be
re-armed and ready for another capture in less than 62.6 microseconds. This capture engine allows the
position capture to obtain more accurate results than those obtained using the scope or recorder clock.
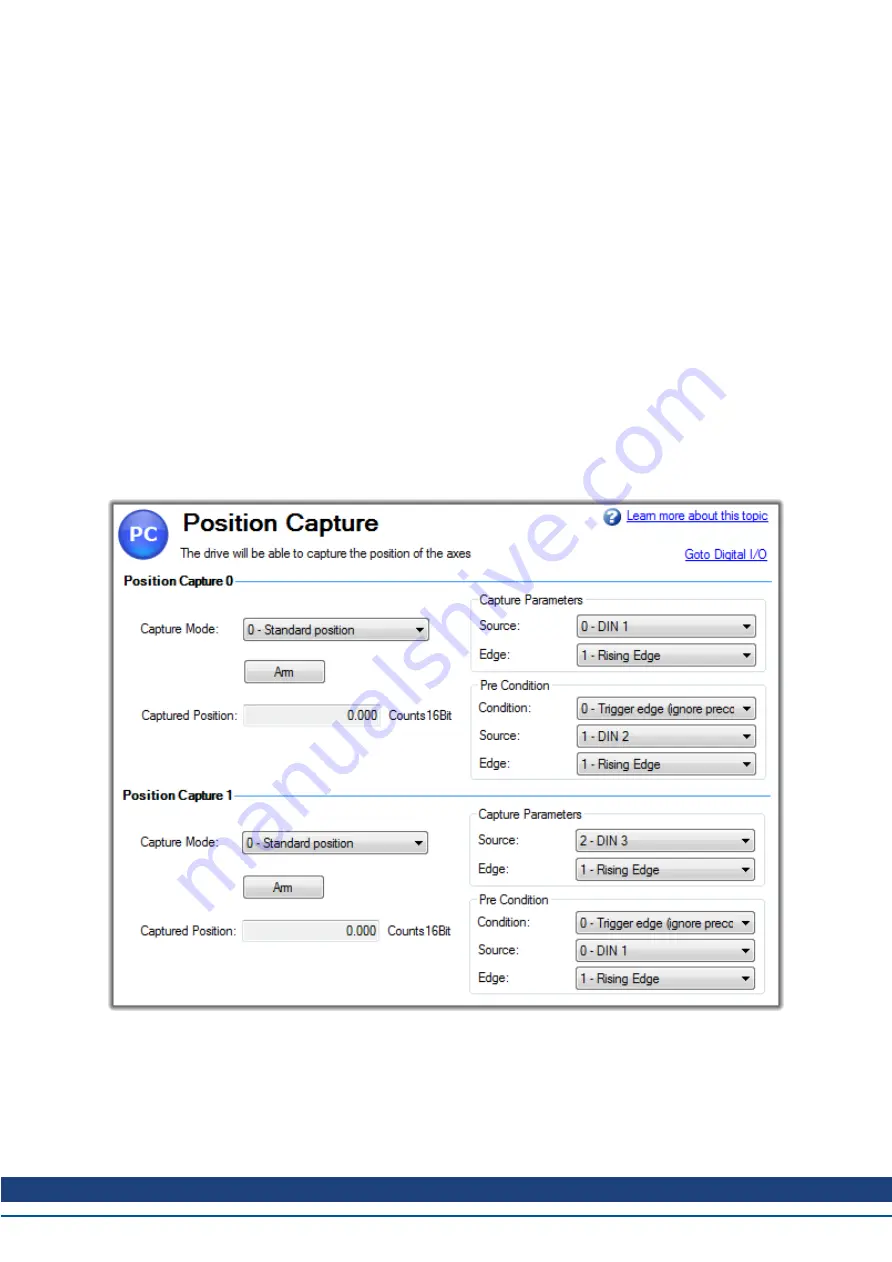
7.6.2 Configuring Position Capture
To configure the position capture, select
Position Capture
from the
Settings
group:
Setting the Capture Source (CAP0.TRIGGER)
The capture source determines which input on the drive causes the position capture to trigger.
Capture Source Options:
Kollmorgen™ | December 2012
53
Summary of Contents for AKD PDMM series
Page 25: ...This page intentionally left blank 25 Kollmorgen December 2012...
Page 32: ...This page intentionally left blank 32 Kollmorgen December 2012...
Page 52: ...This page intentionally left blank 52 Kollmorgen December 2012...
Page 101: ...AKD PDMM User Guide 12 3 6 2 Biquad Calculations 101 Kollmorgen December 2012...
Page 133: ...This page intentionally left blank 133 Kollmorgen December 2012...
Page 158: ...AKD PDMM User Guide 17 Connection Diagrams Kollmorgen December 2012 158...
Page 470: ...AKD PDMM User Guide 48 27 VL THRESH 1 Velocity Loop 470 Kollmorgen December 2012...
Page 511: ...This page intentionally left blank 511 Kollmorgen December 2012...
Page 513: ...This page intentionally left blank 513 Kollmorgen December 2012...







































































