





























AKD PDMM User Guide | 44.3 SM.MODE
SM.MOD-
E
Description
Requirements
2
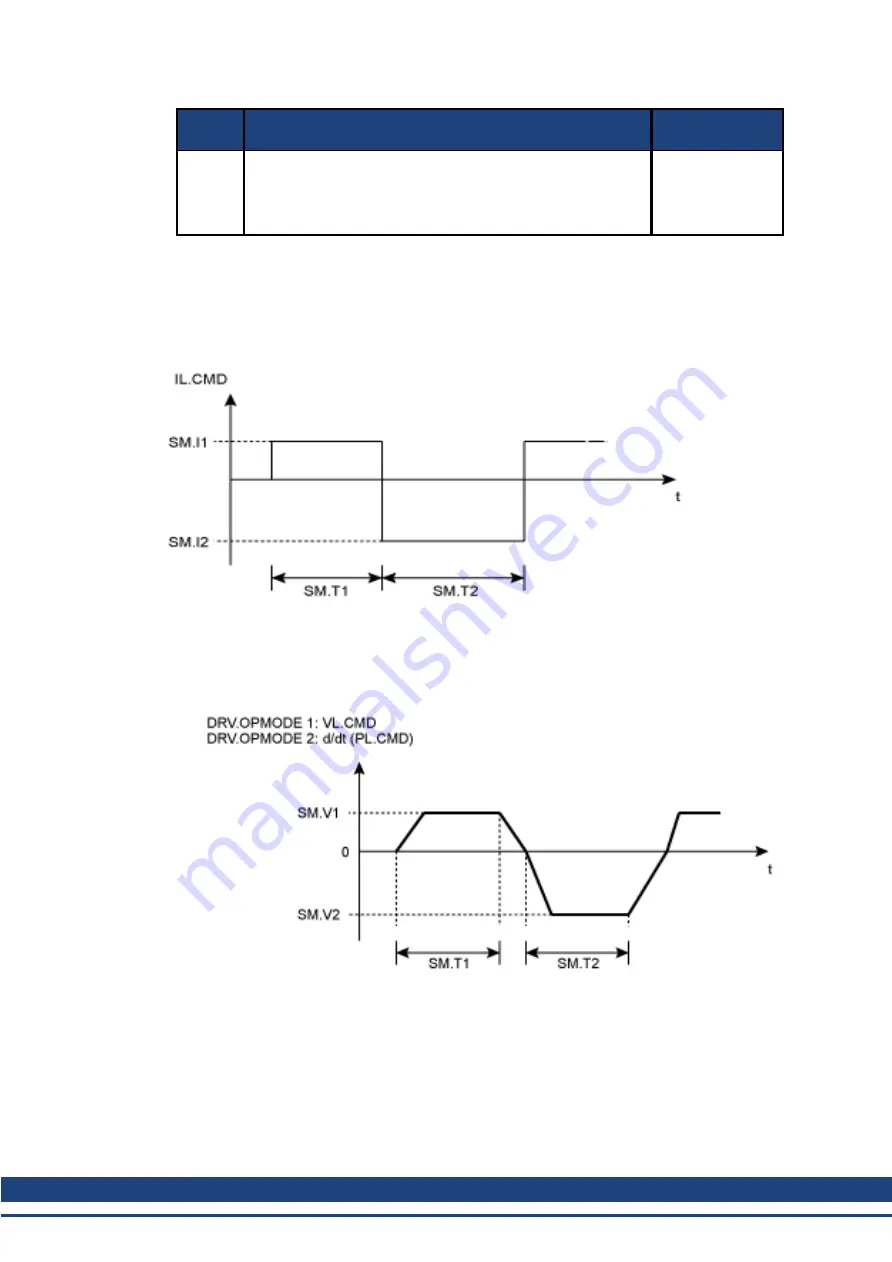
This mode executes the same service motion as mode 0.
However, the motion is described by SM.I2, SM.T2 and
SM.V2. This enables a change on the fly and is mostly used
under fieldbus control.
DRV.OPMODE =
0, 1, or 2
DRV.CMDSOUR-
CE = 0
Ramps
The drive uses DRV.ACC and DRV.DEC for the ramps in DRV.OPMODE 1 (closed velocity)
and 2 (closed position). The drive does not generate any ramps in service motion mode 0 and 1.
Service Motion for DRV.OPMODE 0 and SM.MODE 1
Service motion for DRV.OPMODE 1 or 2 and SM.MODE 1
The deceleration process from SM.V1 or SM.V2 to 0 is not included in SM.T1 and SM.T2,
respectively. SM.T1 and SM.T2 start as soon as the command value has reached the velocity
0.
Related Topics
433
Kollmorgen™ | December 2012
Summary of Contents for AKD PDMM series
Page 25: ...This page intentionally left blank 25 Kollmorgen December 2012...
Page 32: ...This page intentionally left blank 32 Kollmorgen December 2012...
Page 52: ...This page intentionally left blank 52 Kollmorgen December 2012...
Page 101: ...AKD PDMM User Guide 12 3 6 2 Biquad Calculations 101 Kollmorgen December 2012...
Page 133: ...This page intentionally left blank 133 Kollmorgen December 2012...
Page 158: ...AKD PDMM User Guide 17 Connection Diagrams Kollmorgen December 2012 158...
Page 470: ...AKD PDMM User Guide 48 27 VL THRESH 1 Velocity Loop 470 Kollmorgen December 2012...
Page 511: ...This page intentionally left blank 511 Kollmorgen December 2012...
Page 513: ...This page intentionally left blank 513 Kollmorgen December 2012...







































































