





























AKD PDMM User Guide | 14.3 Summary of Parameters and Commands
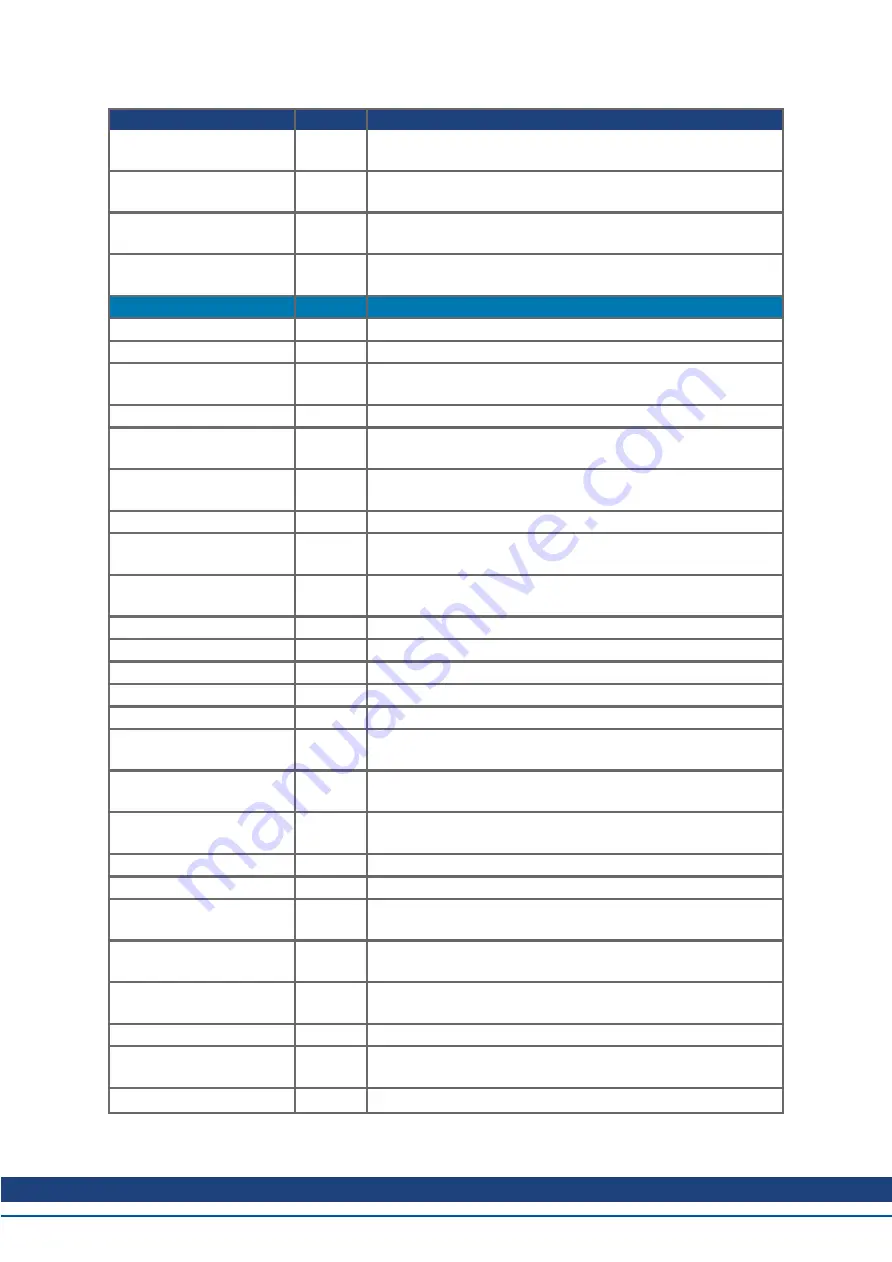
Parameter or Command
Type
Description
DOUT1.STATE AND
DOUT2.STATE (pg 257)
R/O
Reads the digital output state.
DOUT1.STATEU AND
DOUT2.STATEU (pg 257)
R/W
Sets the state of the digital output node.
DOUT21.STATE to
DOUT32.STATE (pg 260)
R/O
Reads the digital output state.
DOUT21.STATEU to
DOUT32.STATEU (pg 260)
R/W
Sets the state of the digital output node.
Drive (DRV)
NV
Describes the acceleration ramp for the velocity loop.
R/O
Reads the enable status of an axis.
Command Causes the display to blink for 10 seconds.
R/O
Returns the time when the current session booted up.
Command Clears the fault history log in the NV.
Command Tries to clear all active faults in the drive.
R/W
Issues a delay before next command is executed.
NV
Sets the command source (service, fieldbus, analog input, gear-
ing, digital, or Bode).
Command Retrieves diagnostic information after the drive crashes.
NV
Sets the maximum amplitude of the current for dynamic braking.
NV
Sets the deceleration value for the velocity loop.
R/O
Lists all parameters which differ from their default value.
R/W
Command Disables the axis (software).
NV
Selects among disable immediately or stop and then disable
options.
R/O
Returns the possible reason for a drive disable.
R/O
Returns a bitmap of all bits in DRV.DISSOURCES that can be
set to one on a given drive.
R/W
R/W
Sets the direction of the emulated encoder output (EEO) signal.
R/W
Sets the mode of the emulated encoder output (EEO) con-
nector.
R/W
Defines the location of the index pulse on the EEO (emulated
encoder output) when DRV.EMUEMODE=2.
Sets the encoder output pulse width for modes 6 to 7.
R/W
Sets the resolution of the EEO (emulated encoder output).
R/W
Sets the location of the EEO (emulated encoder output) index
pulse (when DRV.EMUEMODE=1).
Command Enables the axis (software).
Kollmorgen™ | December 2012
122
Summary of Contents for AKD PDMM series
Page 25: ...This page intentionally left blank 25 Kollmorgen December 2012...
Page 32: ...This page intentionally left blank 32 Kollmorgen December 2012...
Page 52: ...This page intentionally left blank 52 Kollmorgen December 2012...
Page 101: ...AKD PDMM User Guide 12 3 6 2 Biquad Calculations 101 Kollmorgen December 2012...
Page 133: ...This page intentionally left blank 133 Kollmorgen December 2012...
Page 158: ...AKD PDMM User Guide 17 Connection Diagrams Kollmorgen December 2012 158...
Page 470: ...AKD PDMM User Guide 48 27 VL THRESH 1 Velocity Loop 470 Kollmorgen December 2012...
Page 511: ...This page intentionally left blank 511 Kollmorgen December 2012...
Page 513: ...This page intentionally left blank 513 Kollmorgen December 2012...







































































