





























AKD PDMM User Guide | 15.1 Fault and Warning Messages
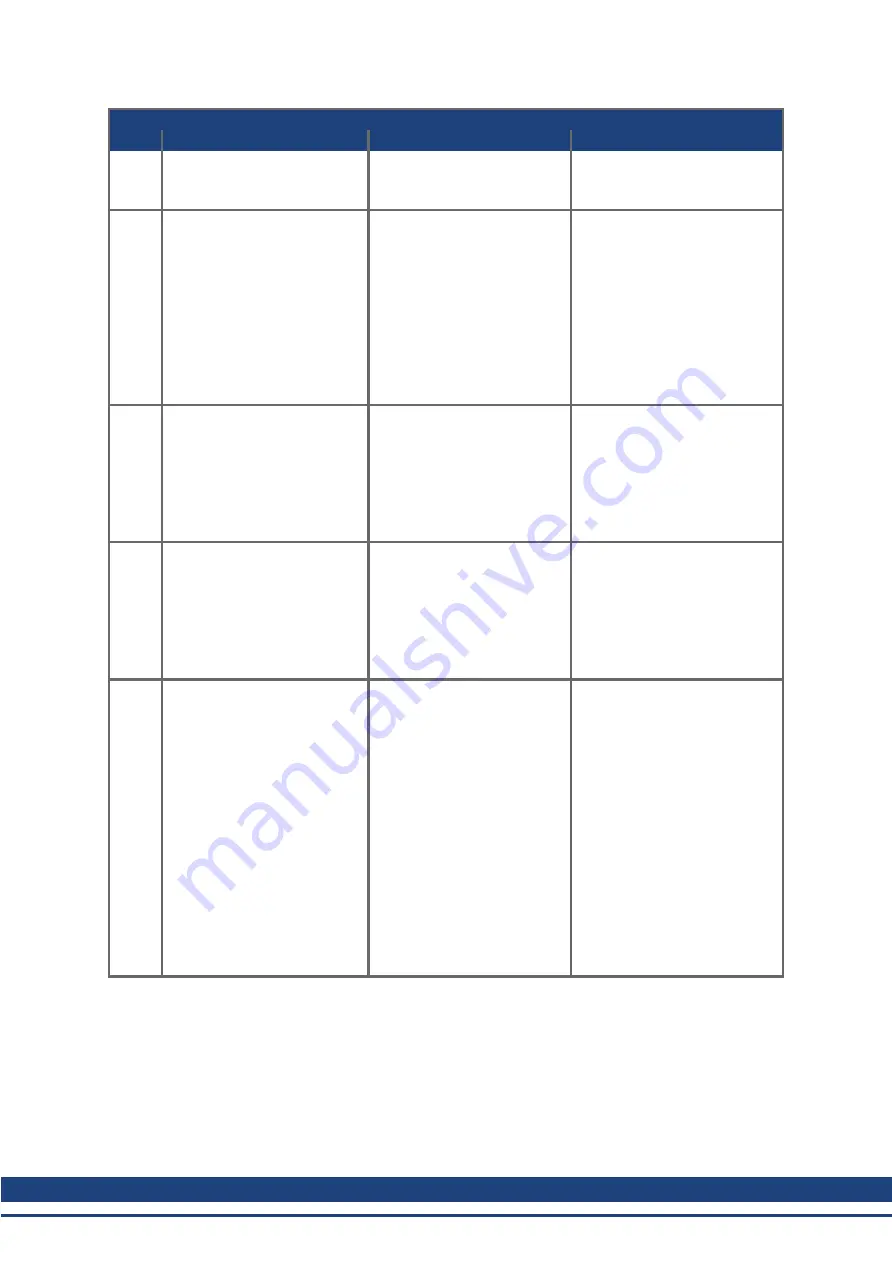
Fault
Message/Warning
Cause
Remedy
n137 Homing and feedback mis-
match
The configured homing mode
is not supported by the motor
feedback type used.
Change homing mode.
F138 Instability during autotune
Drive current (IL.CMD) or
velocity feedback (VL.FB)
exceeds allowable limit
(BODE.IFLIMIT or
BODE.VFLIMIT). This fault
only occurs in BODE.MODE
5. This fault often occurs when
complex mechanics, belts,
and compliant loads are
present.
Change BODE.MODE if appro-
priate. If BODE.MODE 5 is
appropriate and the fault occurs
at the end of an Autotuning, then
the motor is not robustly stable.
You can manually adjust Auto-
tuner settings. Manual tuning
may be required to make the
motor stable.
F139 Target Position Overshot due
to invalid Motion task acti-
vation.
The drive cannot decelerate
from its current speed to reach
the end point of the second
motion task without moving
past it. Increase the decel-
eration rate in the move or
trigger the move earlier.
Change Motion task profile and
clear fault with
DRV.CLRFAULTS. Or change
the value of FAULT13-
9.ACTION = 1 to ignore this con-
dition.
n140 VBUS.HALFVOLT has
changed. Save the parameters
and reboot the drive.
The user has changed the
numerical value of VBUS.HAL-
FVOLT. This change only
takes effect after a
DRV.NVSAVE command and
after rebooting the AKD
PDMM.
Save the parameters in the non-
volatile memory via a
DRV.NVSAVE command and
turn off/on the 24[V] power
supply in order to reboot the
drive or restore the original stet-
ting of VBUS.HALFVOLT.
n151 Not enough distance to move;
motion exception.
For trapezoidal and customer
table motion tasks: The target
velocity specified in the motion
task cannot be reached via
using the selected accel-
eration and deceleration since
the distance to travel is not suf-
ficient.
For a 1:1 profile: The selected
acceleration and deceleration
will be extended since there is
too much distance to travel
and the motion task would
exceed its maximum allowed
velocity.
Activation of any new motion or
using of DRV.CLRFAULTS will
clear the warning. Check motion
task settings and parameters to
make sure that the values
entered will produce a valid
motion task.
137
Kollmorgen™ | December 2012
Summary of Contents for AKD PDMM series
Page 25: ...This page intentionally left blank 25 Kollmorgen December 2012...
Page 32: ...This page intentionally left blank 32 Kollmorgen December 2012...
Page 52: ...This page intentionally left blank 52 Kollmorgen December 2012...
Page 101: ...AKD PDMM User Guide 12 3 6 2 Biquad Calculations 101 Kollmorgen December 2012...
Page 133: ...This page intentionally left blank 133 Kollmorgen December 2012...
Page 158: ...AKD PDMM User Guide 17 Connection Diagrams Kollmorgen December 2012 158...
Page 470: ...AKD PDMM User Guide 48 27 VL THRESH 1 Velocity Loop 470 Kollmorgen December 2012...
Page 511: ...This page intentionally left blank 511 Kollmorgen December 2012...
Page 513: ...This page intentionally left blank 513 Kollmorgen December 2012...







































































