





























AKD PDMM User Guide | 50.11 Synchronization
50.11 Synchronization
On all drives, the internal PLL is theoretically able to even out an average deviation of up to 4800 ppm in
the cycle time provided by the master. The drive checks once per fieldbus cycle a counter within the drive
internal FPGA, which is cleared by a Sync0 (Distributed clock) event. Depending of the counter value, the
drive extends or decreases the 62.5 µs MTS signal within the drive by a maximum of 300 ns.
The theoretical maximum allowed deviation can be calculated by using the following formula:
The synchronization functionality within the drive can be enabled via setting bit 0 of the FBUS.PARAM02
parameter to high. Therefore FBUS.PARAM02 must be set to the value of 1. Furthermore the distributed
clock functionality must be enabled by the EtherCAT master in order to activate cyclic Sync0 events.
50.11.1 Synchronization behavior with distributed clocks (DC) enabled
When the EtherCAT master enables distributed clocks, a distributed clock (DC) event is created in the
AKD PDMM once per fieldbus cycle. An assigned 62.5 µs real-time task in the AKD PDMM monitors the
elapsed time between the DC events and the AKD PDMM System time and extends or reduces the 62.5
µs strobe to the CPU as necessary.
The following fieldbus parameters are used for the synchronization feature:
1. FBUS.SYNCDIST = Expected time delay of the AKD PDMM PLL-code to the DC event.
2. FBUS.SYNCACT = Actual time delay of the AKD PDMM PLL-code to the DC event.
3. FBUS.PLLTHRESH = Number of consecutive successful synchronized PLL cycles of the
AKD PDMM before the Drive is considered as synchronized.
4. FBUS.SYNCWND = Synchronization window in which the AKD PDMM is considered to be
synchronized. The Drive is considered synchronized as long as the following statement is true
is true for FBUS.PLLTHRESH consecutive cycles:
FBUS.SYNCDIST-FBUS.SYNCWND < FBUS.SYNCACT < FBUS.SYN-
CDIST+FBUS.SYNCWND
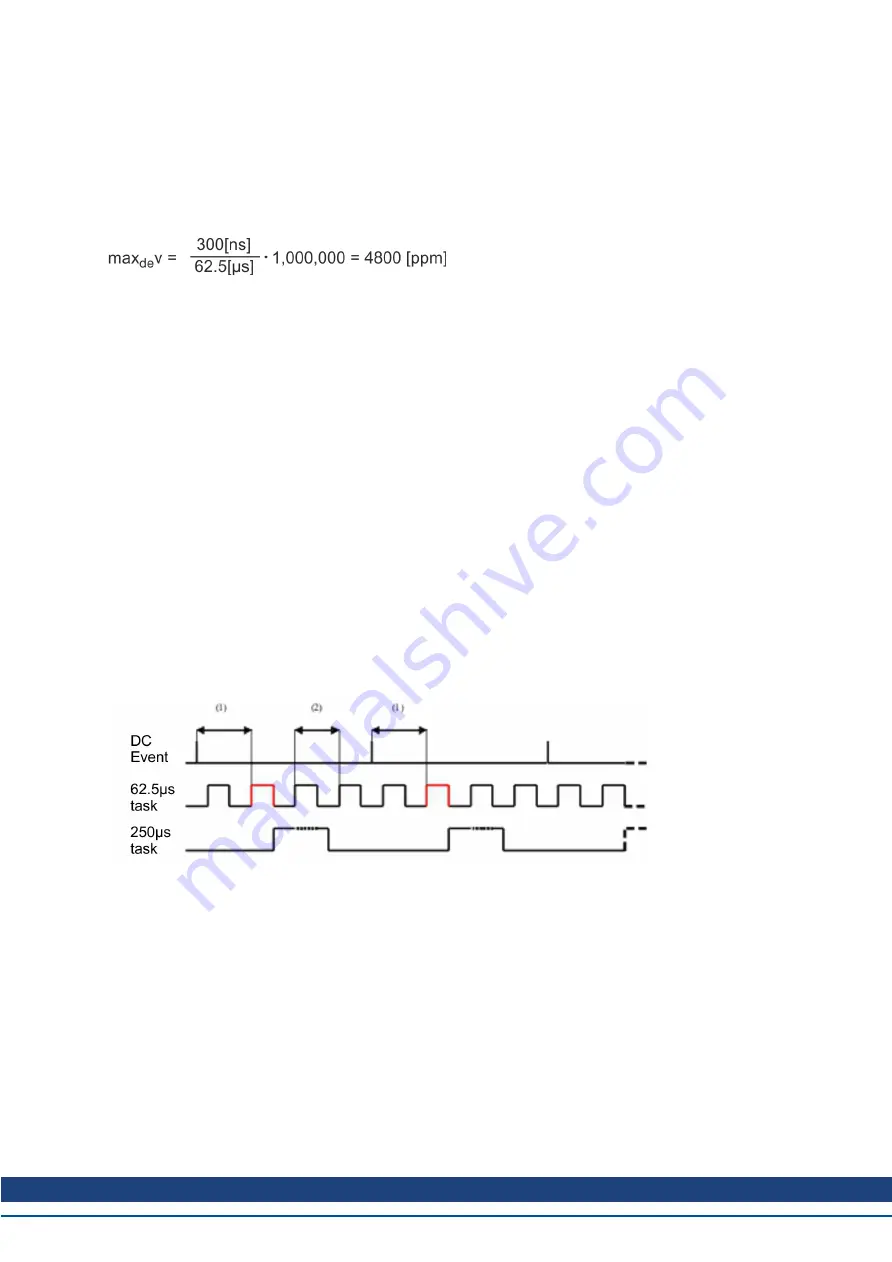
Example with a 4kHz fieldbus sample rate:
Explanation:
The red-marked 62.5[µs] real-time task displays the AKD PDMM 62.5 µs real-time task within one field-
bus cycle which is responsible for calling the AKD PDMM PLL-code. The time delay (1) shows the actual
delay to the previous DC event, which is ideally close to the adjusted FBUS.SYNCDIST parameter.
Depending on (1) the AKD PDMM slightly extends or reduce the 62.5[µs] IRQ generation of the high-prior-
ity real-time task in order to either increase or decrease the measured time delay to the DC event (1) for
the next PLL cycle. The time distance (2) shows the 62.5[µs] ± x[ms] realtime task of the AKD PDMM.
50.11.2 Synchronization behavior with distributed clocks (DC) disabled
The AKD PDMM fieldbus synchronization algorithm is similar to that used by Distributed Clocks. The dif-
ference is that the AKD PDMM synchronizes to a SyncManager2 event instead of the DC event. A Sync-
Manager2 event is created when the EtherCAT Master sends a new package of command values to the
drive while the network is in the Operational state. This occurs once per fieldbus cycle.
Kollmorgen™ | December 2012
491
Summary of Contents for AKD PDMM series
Page 25: ...This page intentionally left blank 25 Kollmorgen December 2012...
Page 32: ...This page intentionally left blank 32 Kollmorgen December 2012...
Page 52: ...This page intentionally left blank 52 Kollmorgen December 2012...
Page 101: ...AKD PDMM User Guide 12 3 6 2 Biquad Calculations 101 Kollmorgen December 2012...
Page 133: ...This page intentionally left blank 133 Kollmorgen December 2012...
Page 158: ...AKD PDMM User Guide 17 Connection Diagrams Kollmorgen December 2012 158...
Page 470: ...AKD PDMM User Guide 48 27 VL THRESH 1 Velocity Loop 470 Kollmorgen December 2012...
Page 511: ...This page intentionally left blank 511 Kollmorgen December 2012...
Page 513: ...This page intentionally left blank 513 Kollmorgen December 2012...